
Costmap does not change on movement [closed]

Hey there,
I do have a problem with my local costmap. As I move with my robot, the map (slam gmapping) changes but the overlying costmap remains unchanged!!!
The launch files for the costmap work, since they are retrieved from move_base costmap. The costmap created under /move_base does change corresponding to the map! But as soon as I instantiate a costmap in my code, it does not update the costmap ...
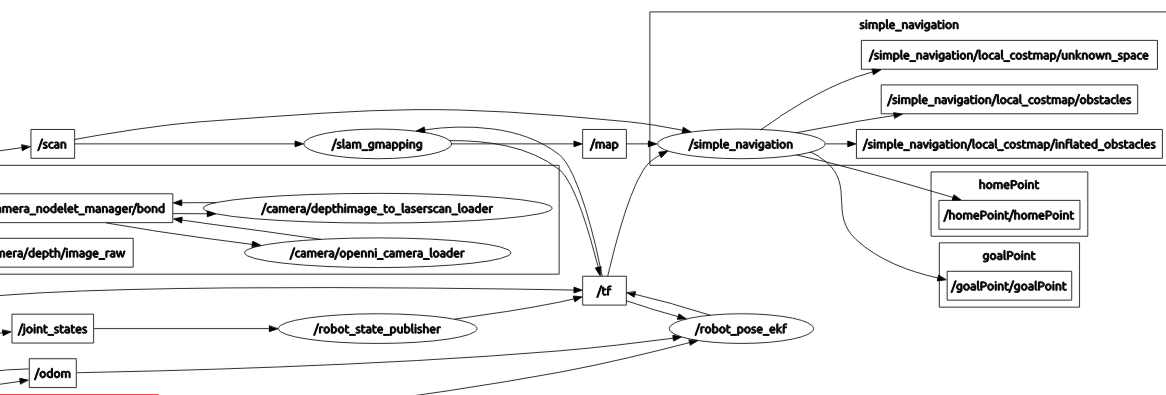
Here is my rqt_graph:
Thanks for your contributions,
BR Daniel
Closed for the following reason
the question is answered, right answer was accepted by
gustavo.velascoh
close date 2014-02-05 02:40:01
add a comment
