
PR2 motor control GUI/interface

Hi folks,
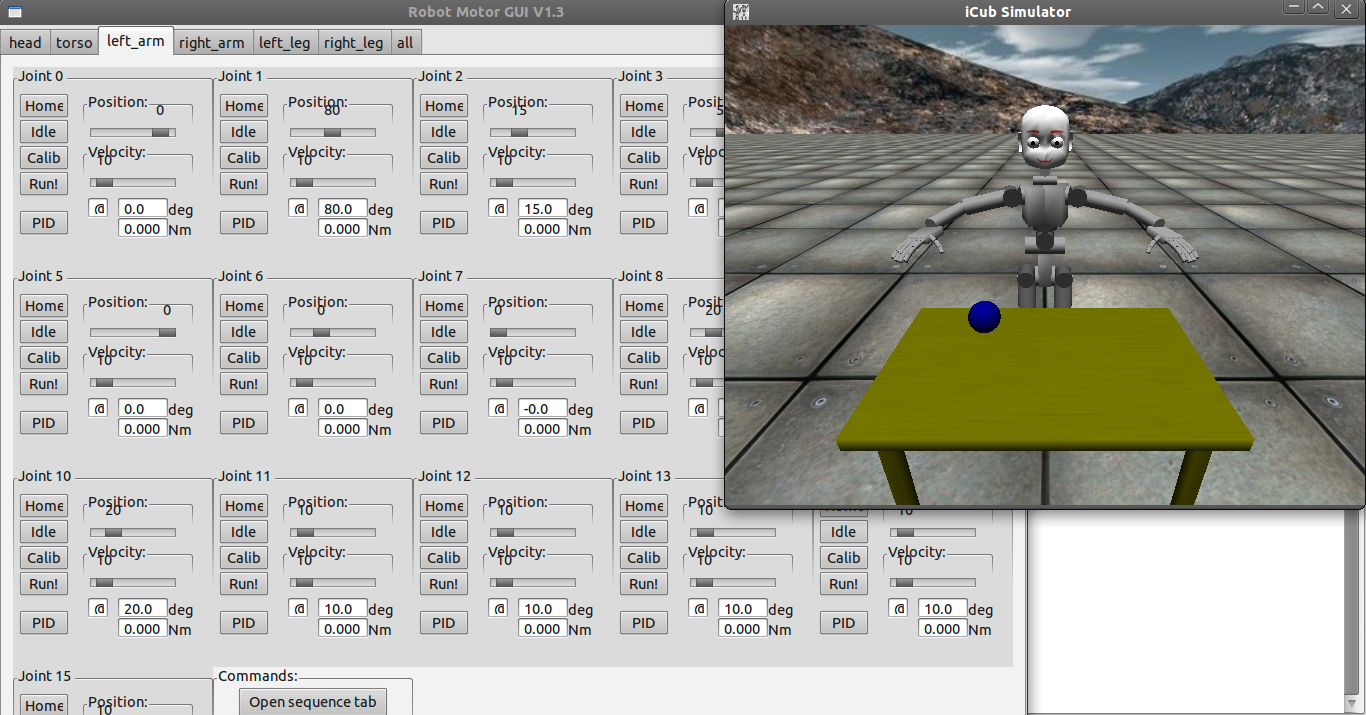
I've been looking around for an easy-to-use GUI-like interface to control joint angles of the PR2, like we have for iCub.
Do you know any tool that can be used in this manner?
Thanks in advance.
add a comment

