The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2023-03-27 10:34:12 -0500 | commented answer | Can I reset RVIZ via topic? This shows me an error: ERROR: Unable to load type [rviz/SendFilePath]. Have you typed 'make' in [rviz]? Do you have |
| 2021-03-18 16:13:26 -0500 | received badge | ● Famous Question (source) |
| 2021-02-16 02:00:09 -0500 | received badge | ● Notable Question (source) |
| 2021-01-17 20:09:09 -0500 | received badge | ● Popular Question (source) |
| 2021-01-15 02:16:45 -0500 | commented answer | How to avoid obstacles in op_planner Thank you very much |
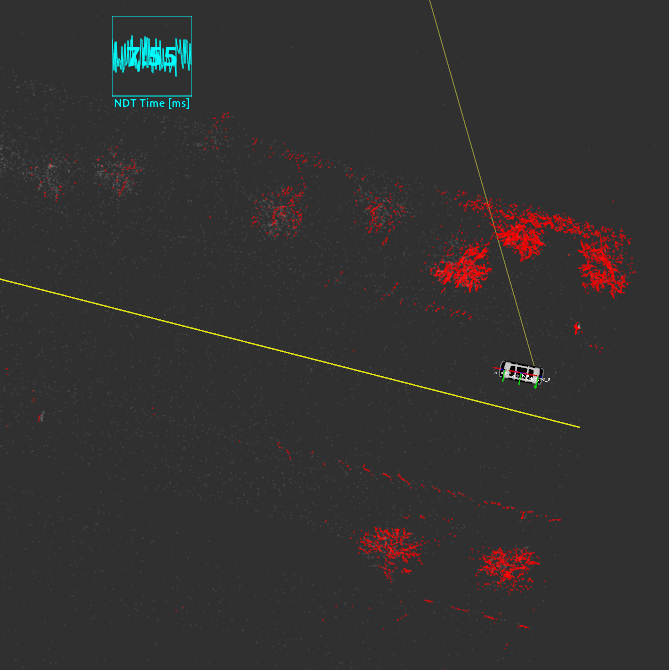
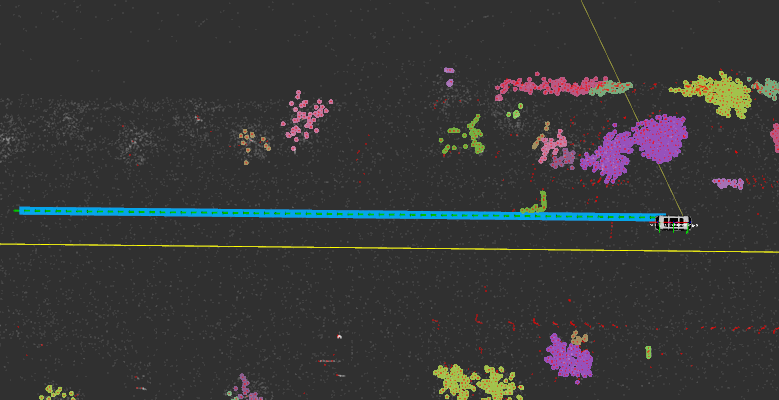
| 2021-01-14 03:14:58 -0500 | marked best answer | How to avoid obstacles in op_planner I have also this problem that seems the vehicle doesn't detect any obstacle. I am using ubuntu 1.18 ros melodic and Autoware 1.14 (I am also using LGSVL as simulator) @cwhong yes I am using lidar for detection. and I used a ray ground filter for ground removal. it publishes point on /points_no_ground as you said. here is my screen: (yellow line is the road middle)
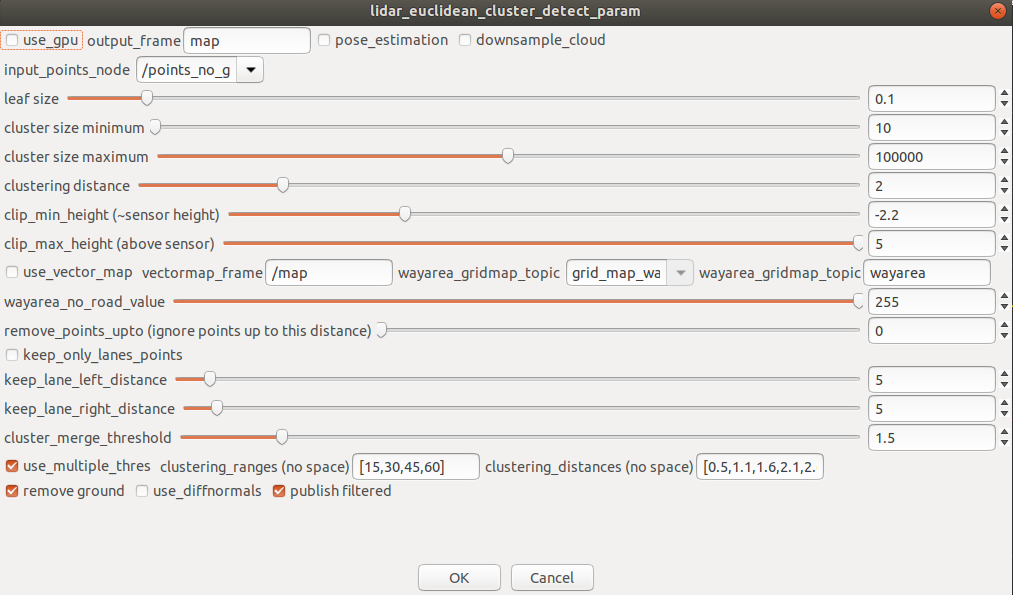
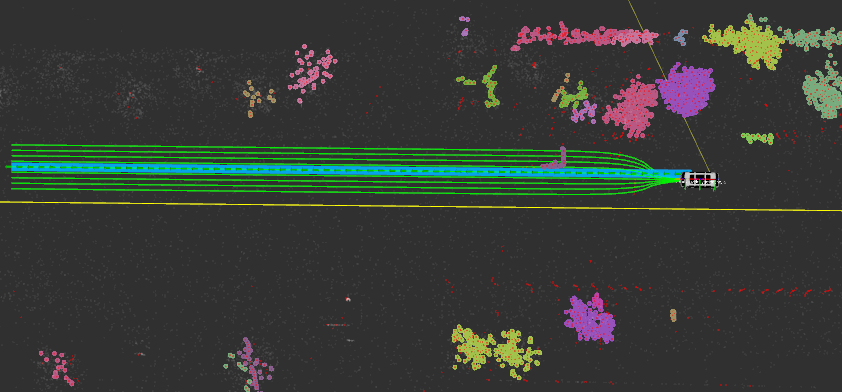
then I start "lidar_euclidean_cluster_detect with this setting(based on what i read i change the output frame to "map"):
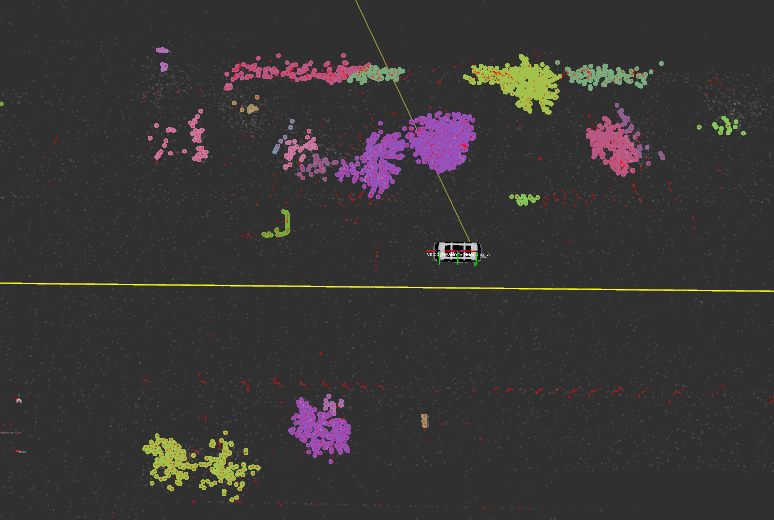
and here is my screen, so far so good!, it detects the obstacle in front of it.:
But the /detection/lidar_detector/objects_markers is on the map frame and in rviz it was shown near the map frame far from the vehicle.
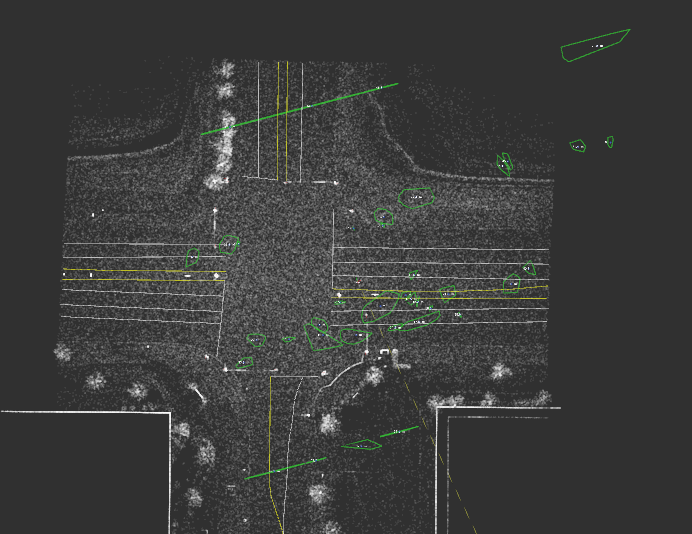
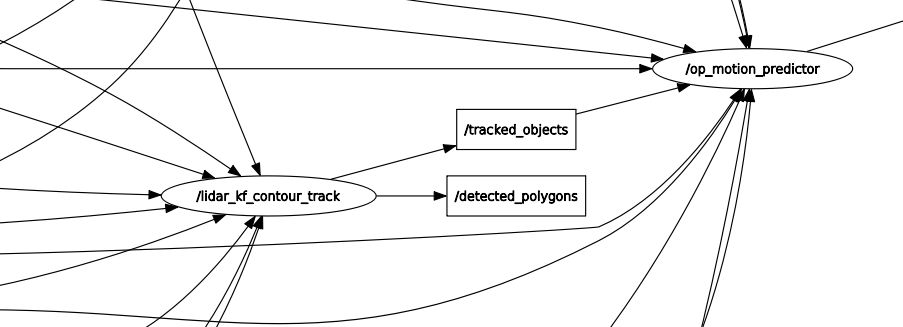
I turn on lidar_kf_contour_track and start op_global_planner:
Then start these nodes in order: op_common_params op_trajectory_generator then it creates the roll outs:
op_trajectory_evaluator op_behavior_selector pure_pursuit twist_filter the vehicle starts to move but it does not consider the obstacle and it crashes. also what is noticeable is that there is nothing in the topic /tracked_object published by liar_kf_contour_track. basically, the open planner sees nothing!
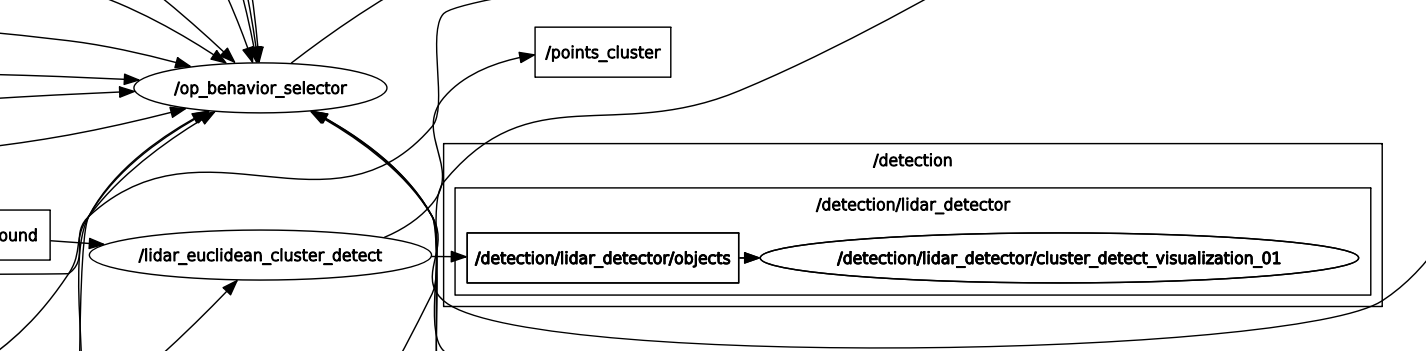
and also nothing listen to the euclidean cluster!
I appreciate it if you have any idea. |
| 2021-01-14 03:14:58 -0500 | received badge | ● Scholar (source) |
| 2021-01-14 03:14:53 -0500 | answered a question | How to avoid obstacles in op_planner So far by changing the topic of sub_cloud_clusters to /detection/lidar_detector/cloud_clusters in the lidar_kf_contour_t |
| 2021-01-14 03:14:53 -0500 | received badge | ● Rapid Responder (source) |
| 2021-01-14 01:08:25 -0500 | received badge | ● Supporter (source) |
| 2021-01-14 01:03:51 -0500 | asked a question | How to avoid obstacles in op_planner How to avoid obstacles in op_planner I have also this problem that seems the vehicle doesn't detect any obstacle. I am u |
| 2021-01-13 16:08:41 -0500 | answered a question | How to implement avoid obstacle with open_planner in Autoware? I have also this problem that seems the vehicle doesn't detect any obstacle. I am using ubuntu 1.18 ros melodic and Auto |
| 2021-01-13 15:40:33 -0500 | commented answer | How to implement avoid obstacle with open_planner in Autoware? @cwhong thank you very much, so let's create a new post here to put pictures and explain what's going in my case. |
| 2021-01-13 08:21:22 -0500 | received badge | ● Enthusiast |
| 2021-01-12 04:06:11 -0500 | commented answer | How to implement avoid obstacle with open_planner in Autoware? @wangludong I had the same problem for publishing a point in RViz by using that but. I suggest using a python code for p |
| 2021-01-11 05:57:54 -0500 | commented answer | How to implement avoid obstacle with open_planner in Autoware? @wangludong after checking your setting for rollout num, check your op_trajectory_generator node. after that check the r |
| 2021-01-10 15:06:29 -0500 | commented answer | How to implement op planner's obstacle avoidance and lane change? @hatem Thank you for your efforts, I checkout this in autoware 1.13 installation but it gives me this error while buildi |
| 2020-12-29 23:59:03 -0500 | received badge | ● Famous Question (source) |
| 2020-12-28 07:57:03 -0500 | marked best answer | Autoware.ai Documentation Hello all, Do you know where is the Autoware.ai documentation? I am trying to find information about different launch files, but I can’t find the previous doc. |
| 2020-12-03 11:26:51 -0500 | received badge | ● Notable Question (source) |
| 2020-12-03 11:26:51 -0500 | received badge | ● Popular Question (source) |
| 2020-11-25 07:20:46 -0500 | asked a question | Autoware.ai Documentation Autoware.ai Documentation Hello all, Do you know where is the Autoware.ai documentation? I am trying to find information |
| 2020-03-10 01:01:43 -0500 | received badge | ● Student (source) |
| 2020-03-10 01:00:49 -0500 | received badge | ● Famous Question (source) |
| 2019-12-22 23:50:58 -0500 | received badge | ● Notable Question (source) |
| 2019-11-29 08:52:25 -0500 | received badge | ● Popular Question (source) |
| 2019-11-29 05:01:35 -0500 | commented answer | Using Autoware in Matlab simulation Thanks for your responce, I should work with this nodes, and publish my data to it, then share my result here. |
| 2019-11-28 06:44:19 -0500 | commented answer | Using Autoware in Matlab simulation I already did, but the problem is finding the main node is very hard. which node pure pursuit is using and how can I ign |
| 2019-11-28 01:59:33 -0500 | asked a question | Using Autoware in Matlab simulation Using Autoware in Matlab simulation Hi all, I am going to make a simulation of self-driving cars with Matlab and Autowar |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.