
How to avoid obstacles in op_planner
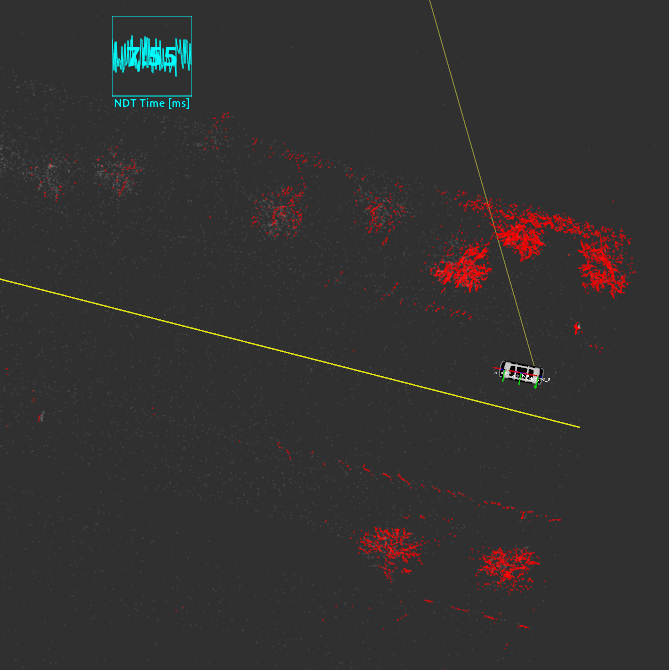
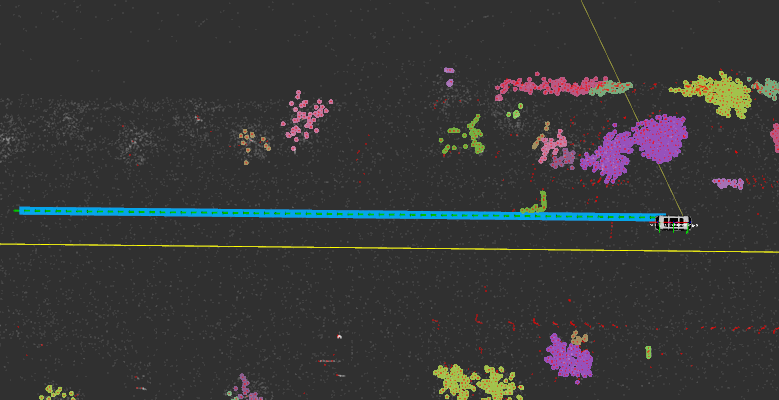
I have also this problem that seems the vehicle doesn't detect any obstacle. I am using ubuntu 1.18 ros melodic and Autoware 1.14 (I am also using LGSVL as simulator) @cwhong yes I am using lidar for detection. and I used a ray ground filter for ground removal. it publishes point on /points_no_ground as you said. here is my screen: (yellow line is the road middle)
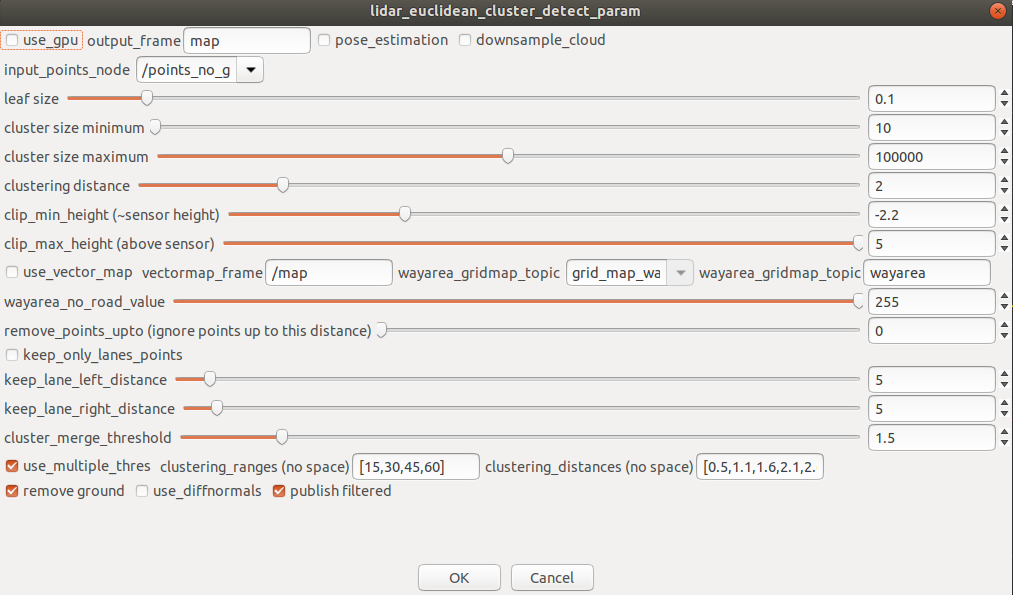
then I start "lidar_euclidean_cluster_detect with this setting(based on what i read i change the output frame to "map"):
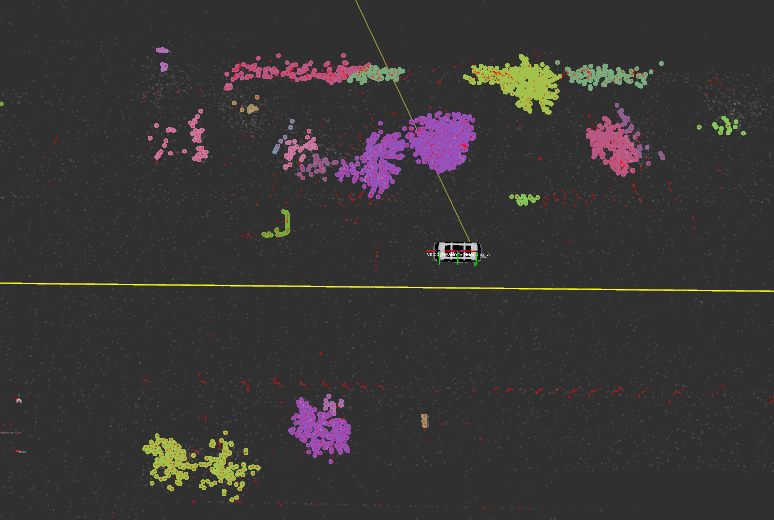
and here is my screen, so far so good!, it detects the obstacle in front of it.:
But the /detection/lidar_detector/objects_markers is on the map frame and in rviz it was shown near the map frame far from the vehicle.
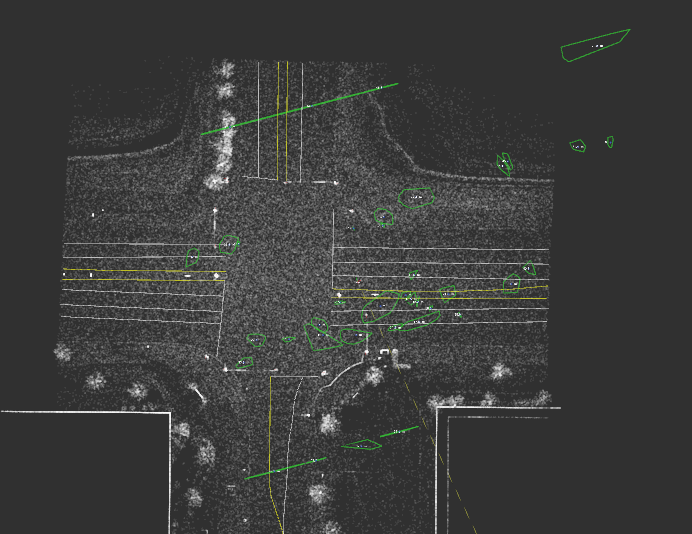
I turn on lidar_kf_contour_track and start op_global_planner:
Then start these nodes in order:
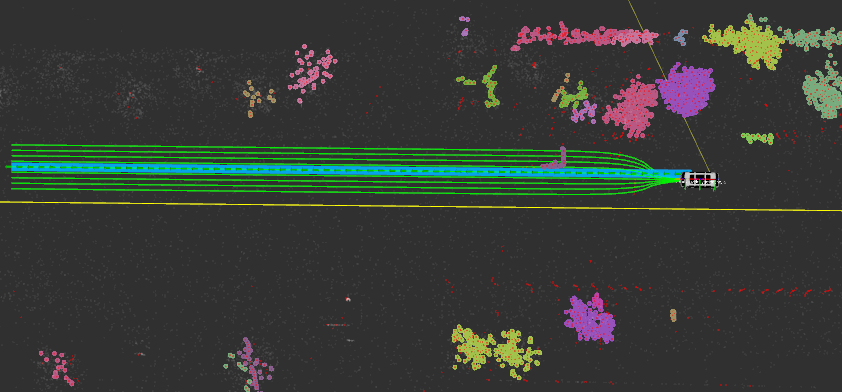
op_common_params op_trajectory_generator then it creates the roll outs:
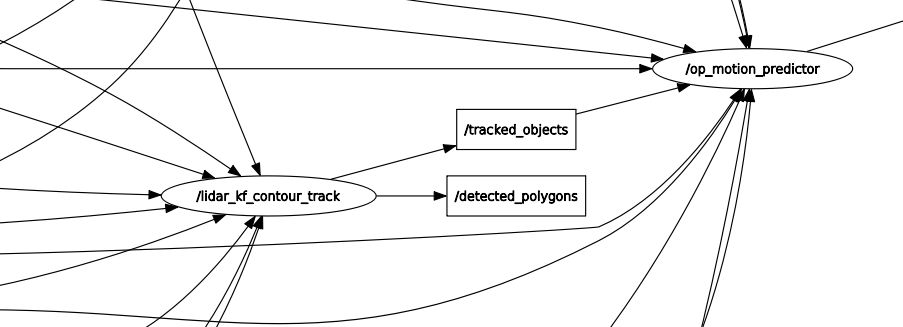
op_trajectory_evaluator op_behavior_selector pure_pursuit twist_filter the vehicle starts to move but it does not consider the obstacle and it crashes. also what is noticeable is that there is nothing in the topic /tracked_object published by liar_kf_contour_track. basically, the open planner sees nothing!
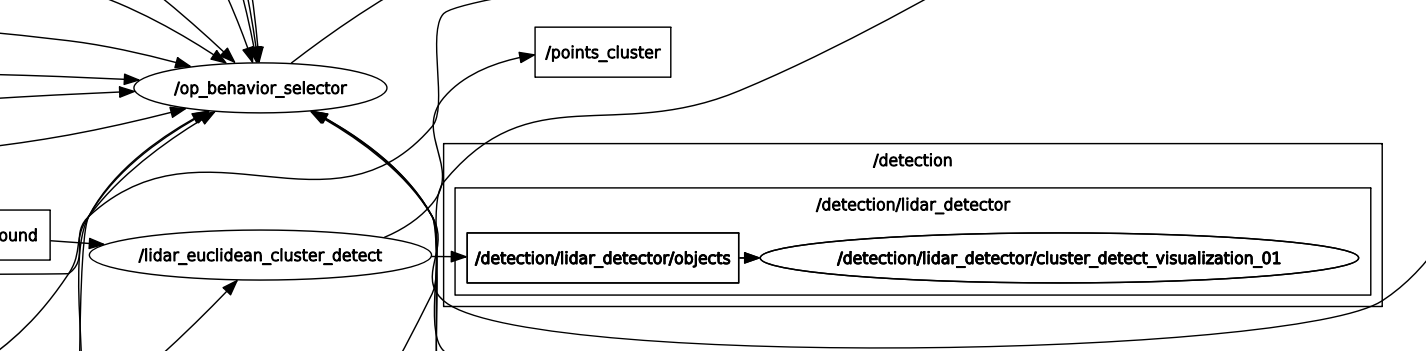
and also nothing listen to the euclidean cluster!
I appreciate it if you have any idea.

