
How to implement avoid obstacle with open_planner in Autoware?

Hi, I used Autoware 1.12.0 in Ubuntu 16.04
I want to avoid obstacle with open planner. Now, I used these below nodes.
- lidar_euclidean_cluster_detect
- lidar_kf_contour_track
- op_global_planner
- op_common_params
- op_trajectory_generator
- op_trajectory_evaluator
- op_behavior_selector
- pure_pursuit
- twist_filter
I have vector_map, /current_pose, /points_raw already. That's why I didn't use the ndt_matching node.
How to avoid obstacle with those nodes?
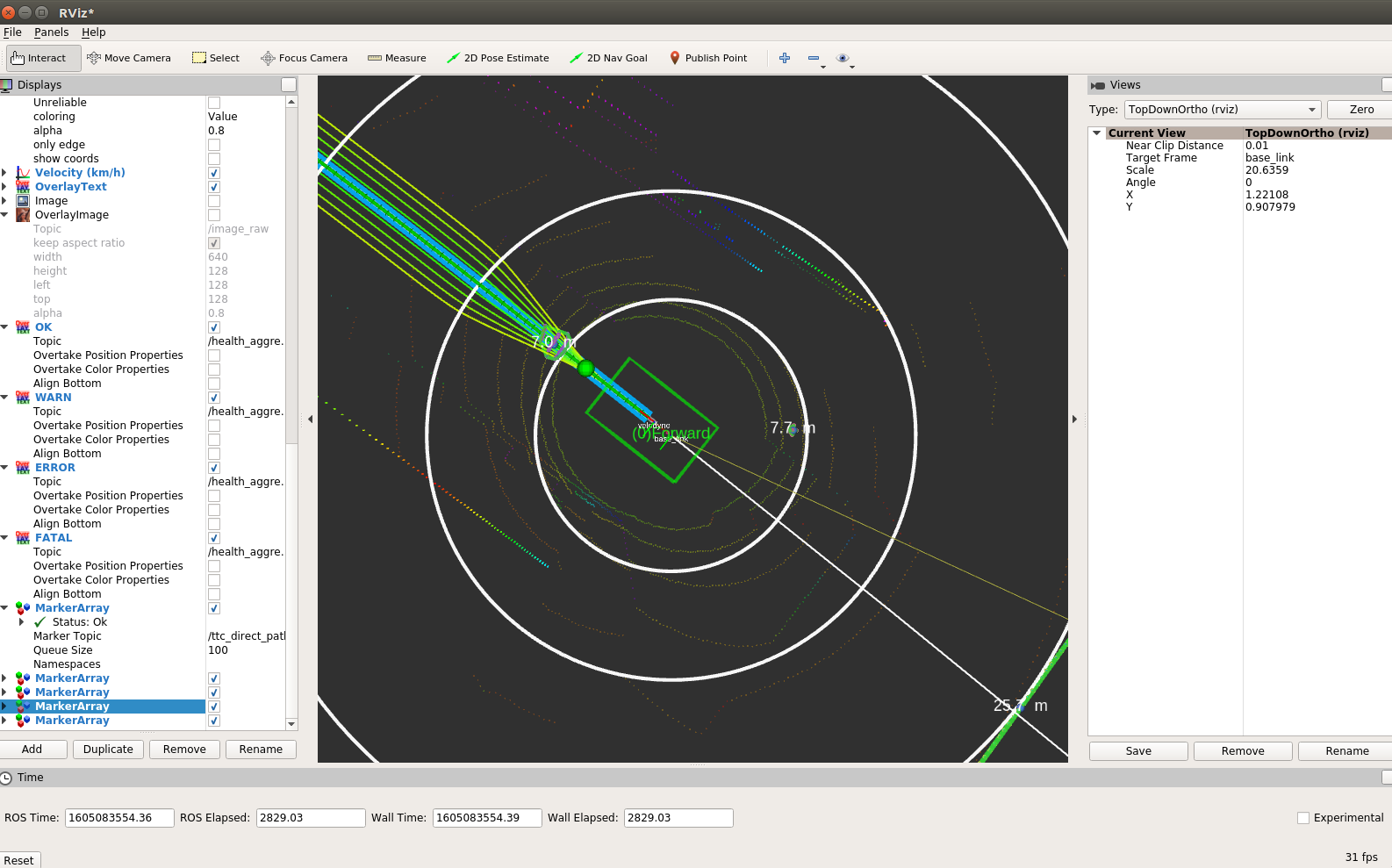
This is rviz of current situation. There's no 'red' path..
please answer on this question. Thank you!

@Hatem Would you be able to answer this question?
sure, thanks.
Thank you!
@cwhong
Hello.
I enabled the same nodes as you mentioned, but I can't see the bunch of green lines before the car. Could you tell me how to turn them on? Thank you.
So what do you see in rviz now? Can you see everything except the green line? ex) vectormap_center_lines etc.
@cwhong
Please check the image.
https://ibb.co/SwpfYrq
I placed an obstacle before my car and wanted to overtake it, but my car just stopped then.I think these green lines(maybe called roll out trajectory) are big deal.
I think that green line doesn't appear seems to be the 'local planner' not working properly. Please check below nodes. op_common_params, op_trajectory_generator, op_trajectory_evaluator, op_behavior_selector. In op_common_params(config), please check 'roll_out_num'. I set that 8.
@wangludong after checking your setting for rollout num, check your op_trajectory_generator node. after that check the rviz and turn off and on the rollout feature once. sometimes it can be the issue.
@cwhong@Mohsen.ciw
Thank you all of you.
I have turned these trajectories on now.
In my case, I associated autoware with carla and spawned a car in carla as an obstacle. But it seemed my ego car can't detect it.
As you can see from the image below, all trajectories are green, and the obstacle is in purple color.
https://ibb.co/PZ3T8jB
Do you know how to place an obstacle in RViz directly.
Once I clicked the "Publish Point" button, RViz crashed unexpectedly.
I run the 'lidar_euclidean_cluster_detect' node in autoware to mark the obstacle in rviz and to let the car recognize it. And when I matched the 'tf' of that node to 'map', my ego car detect the obstacle.
@wangludong I had the same problem for publishing a point in RViz by using that but. I suggest using a python code for publishing a position you can find a sample easily by googling. @cwhong I also did the same, I set the output frame of "lidar_euclidean_cluster_detect" to "map" but no obstacle was detected by my local trajectory generator. do you know which node the open planner listens to for detecting the object? I also turn on "lidar_kf_contour_track_object" but the topic "tracked_object" that is publishing by this node is empty! I am using autoware.ai 1.14. do you have any idea?