The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2020-05-05 12:12:26 -0500 | received badge | ● Famous Question (source) |
| 2019-12-06 04:22:37 -0500 | received badge | ● Famous Question (source) |
| 2019-11-20 11:47:28 -0500 | received badge | ● Notable Question (source) |
| 2019-10-16 04:36:44 -0500 | received badge | ● Popular Question (source) |
| 2019-10-08 07:40:37 -0500 | received badge | ● Notable Question (source) |
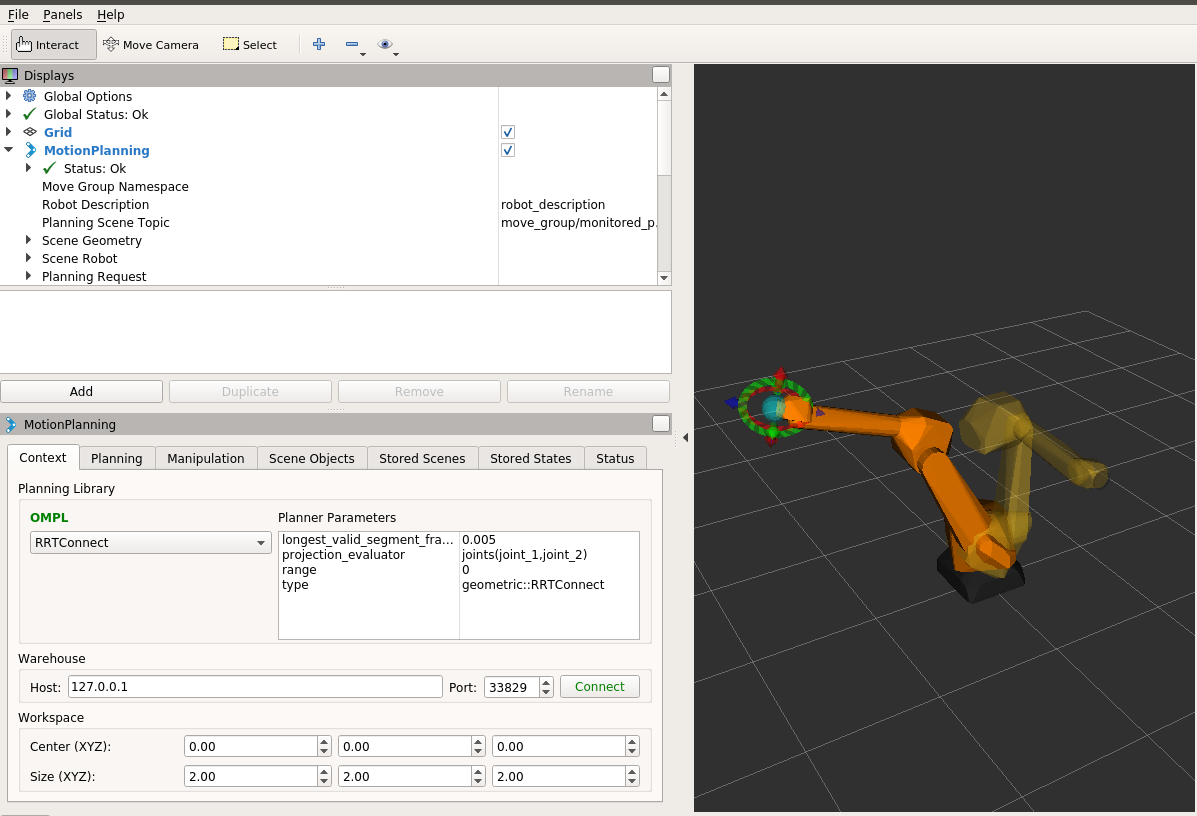
| 2019-10-08 05:15:52 -0500 | marked best answer | Problem with planning and executing path for custom Fanuc robot in Roboguide - ghost effect Hi everyone During my internship i tried to create simple Movit plugin for not supported Fanuc robot (710ic70) and test it in ROBOGUIDE. I was able to run robot_state_visualize but when I tried to run moveit_planning_execution.launch I got some weird ghosting effect. While planning and executing movement in Moveit plugin for RVIZ, in most of the cases, robot starts not from the actual position but from default position. From time to time robot in ROBOGUIDE is able to move accordingly to my plan but when ghost shows up I have to restart roslunch.
What can be the case of that kind of problem? Both RSTA and RREL are always connected. I tried to do the same with m10ia_moveit_config for and everything works fine. My Setup: Windows PC with ROBOGUIDE and a Ubuntu 18.04 VM with Melodic distro Log from the program |
| 2019-08-28 05:21:30 -0500 | commented question | Unable to find/localize log file I tried to run it separately but for some reason node also have some issues. ~/catkin_workspace# rosrun bezier_examples |
| 2019-08-28 05:21:20 -0500 | commented question | Unable to find/localize log file I tried to run it separately but for some reason node also have some issues. ~/catkin_workspace# rosrun bezier_examples |
| 2019-08-28 05:19:35 -0500 | commented question | Unable to find/localize log file When it comes to log files that’s what I got -rw-r--r-- 1 root root 1365 srp 28 08:15 master.log -rw-r--r-- 1 root roo |
| 2019-08-27 08:26:05 -0500 | asked a question | Unable to find/localize log file Unable to find/localize log file Hi everyone I was trying to run Bezier_examples package but for some reason after star |
| 2019-08-25 06:34:09 -0500 | received badge | ● Popular Question (source) |
| 2019-08-14 06:49:38 -0500 | commented question | Problem with planning and executing path for custom Fanuc robot in Roboguide - ghost effect You were right, I had two nodes publishing on /joint_states topic. One was publishing current robot states, another 0s. |
| 2019-08-07 10:09:11 -0500 | asked a question | Problem with planning and executing path for custom Fanuc robot in Roboguide - ghost effect Problem with planning and executing path for custom Fanuc robot in Roboguide - ghost effect Hi everyone During my inter |
| 2019-07-30 03:03:53 -0500 | received badge | ● Enthusiast |
| 2019-05-07 13:50:22 -0500 | received badge | ● Supporter (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.