The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2018-01-22 09:06:08 -0500 | marked best answer | Basic user interface, run nodes, Is it possible for me to create an User Interface which allow me to run some nodes by just clicking buttons without typing codes in the terminal? |
| 2017-02-10 07:14:35 -0500 | received badge | ● Famous Question (source) |
| 2016-10-14 02:28:15 -0500 | received badge | ● Famous Question (source) |
| 2016-10-14 02:28:15 -0500 | received badge | ● Notable Question (source) |
| 2016-06-13 14:49:20 -0500 | received badge | ● Famous Question (source) |
| 2016-05-16 10:13:56 -0500 | received badge | ● Notable Question (source) |
| 2016-02-26 06:45:40 -0500 | received badge | ● Famous Question (source) |
| 2016-01-16 21:42:16 -0500 | received badge | ● Notable Question (source) |
| 2016-01-05 11:12:37 -0500 | received badge | ● Taxonomist |
| 2016-01-05 01:48:18 -0500 | received badge | ● Famous Question (source) |
| 2015-09-07 02:38:17 -0500 | received badge | ● Notable Question (source) |
| 2015-04-16 04:10:53 -0500 | received badge | ● Famous Question (source) |
| 2015-04-02 14:58:50 -0500 | received badge | ● Notable Question (source) |
| 2015-03-23 15:50:21 -0500 | received badge | ● Student (source) |
| 2015-03-23 15:50:13 -0500 | received badge | ● Popular Question (source) |
| 2015-03-21 11:52:07 -0500 | received badge | ● Famous Question (source) |
| 2015-03-18 10:10:37 -0500 | received badge | ● Popular Question (source) |
| 2015-03-18 09:42:54 -0500 | received badge | ● Famous Question (source) |
| 2015-03-18 06:27:32 -0500 | asked a question | remote launch I want to remote run some nodes, below was my coding the sh file as below: Then its show the error like that |
| 2015-03-18 04:02:09 -0500 | asked a question | How to Monitor the data transfer Hi everyone, I would like to know how to monitor all the data transfer between ros. There are two computers connected by using same roscore master. I want to measure the amount of data transfering every second or in a period. Thanks |
| 2015-03-11 06:07:19 -0500 | commented answer | how do I improve the steam video speed in ROS Thank you very much, its much more smooth by setting it to compressed. Sorry for asking some stupid questions. rosrun image_view image_view image:=/usb_cam/image_raw _image_transport:=compressed |
| 2015-03-10 06:14:17 -0500 | commented answer | How to subcribe tf transform from map to odom by gmapping into odom to baselink? However, when the odom frames move, the robot remains stationary. The transform from map to odom published by gmapping and amcl is not send to the base_link |
| 2015-03-10 06:12:56 -0500 | commented answer | How to subcribe tf transform from map to odom by gmapping into odom to baselink? I have made this change: |
| 2015-03-06 02:19:43 -0500 | received badge | ● Notable Question (source) |
| 2015-03-06 01:10:21 -0500 | commented answer | How to subcribe tf transform from map to odom by gmapping into odom to baselink? do you mean i should use this lookuptransform instead of odom to get my robot pose? something like this: try { listener.lookupTransform("map", "base_link", ros::Time(0), transform_in_map); } catch(tf::TransformException &exception) { ROS_ERROR("%s", exception.what()); } |
| 2015-03-06 01:09:35 -0500 | commented answer | How to subcribe tf transform from map to odom by gmapping into odom to baselink? Currently I am getting my robot position in map by this way: |
| 2015-03-05 10:52:22 -0500 | received badge | ● Popular Question (source) |
| 2015-03-05 05:02:13 -0500 | asked a question | how do I improve the steam video speed in ROS Hello, thank you for spending your time try to help my problem. Now I have two computers and would like to show the steam video on both computers through wifi connection. the package Im using is usb_cam, by using the same master host from one computer ( ROS_MASTER_URI=http://xxx:11311) It could shows the video but in very low fps and unstable if the resolution is higher than 480p To sustain fps around 20, the maximum is 240p. But the wifi connection shows is around 200-300 mbps. What should i do to improve this? Best, mree |
| 2015-03-05 04:53:15 -0500 | commented answer | How to subcribe tf transform from map to odom by gmapping into odom to baselink? my tf tree now is /map -> /odom -> base_link is it what you means as below? /map -> /base_link /map -> /odom |
| 2015-03-05 04:49:58 -0500 | received badge | ● Commentator |
| 2015-03-05 04:49:58 -0500 | commented answer | How to subcribe tf transform from map to odom by gmapping into odom to baselink? Sorry for late reply, but my odometry transform is from odom to base_link. How could achieve directly from /amp ->/base_link |
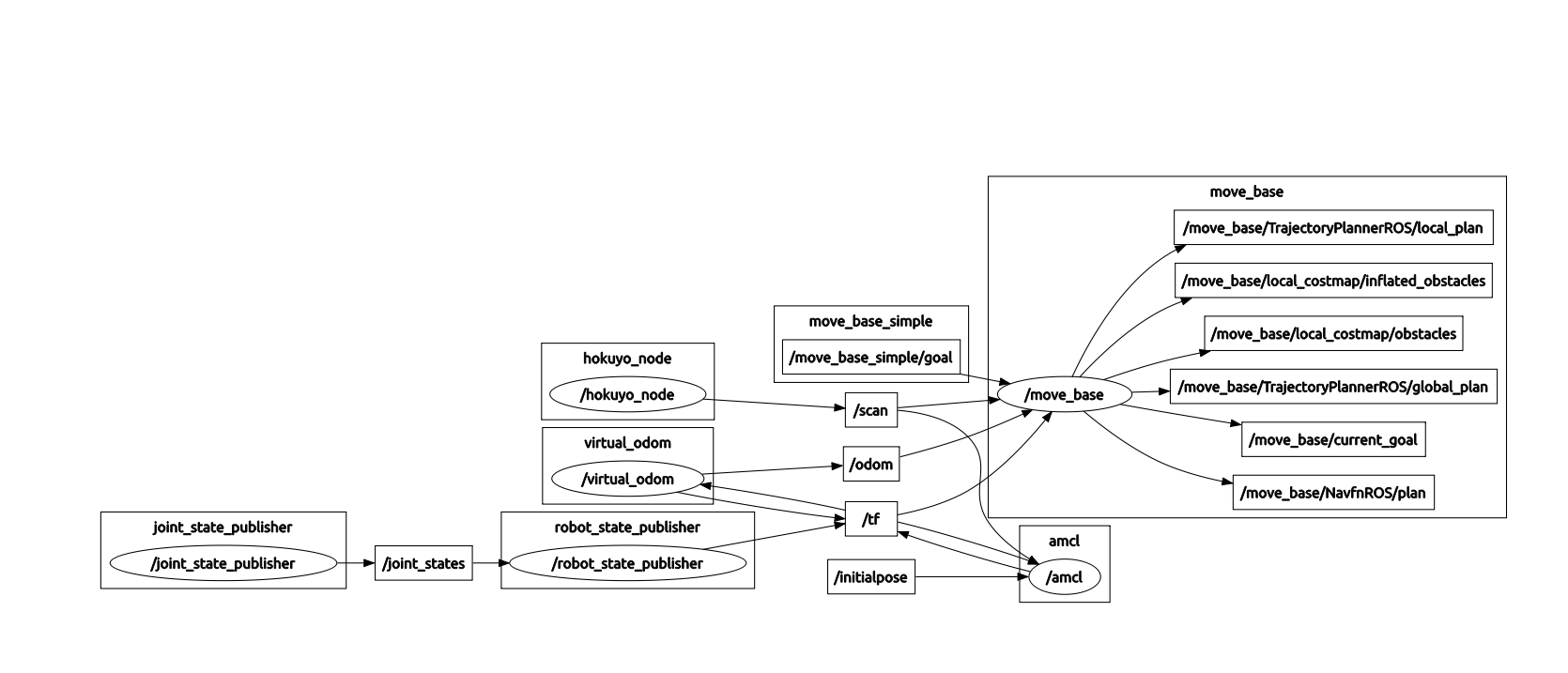
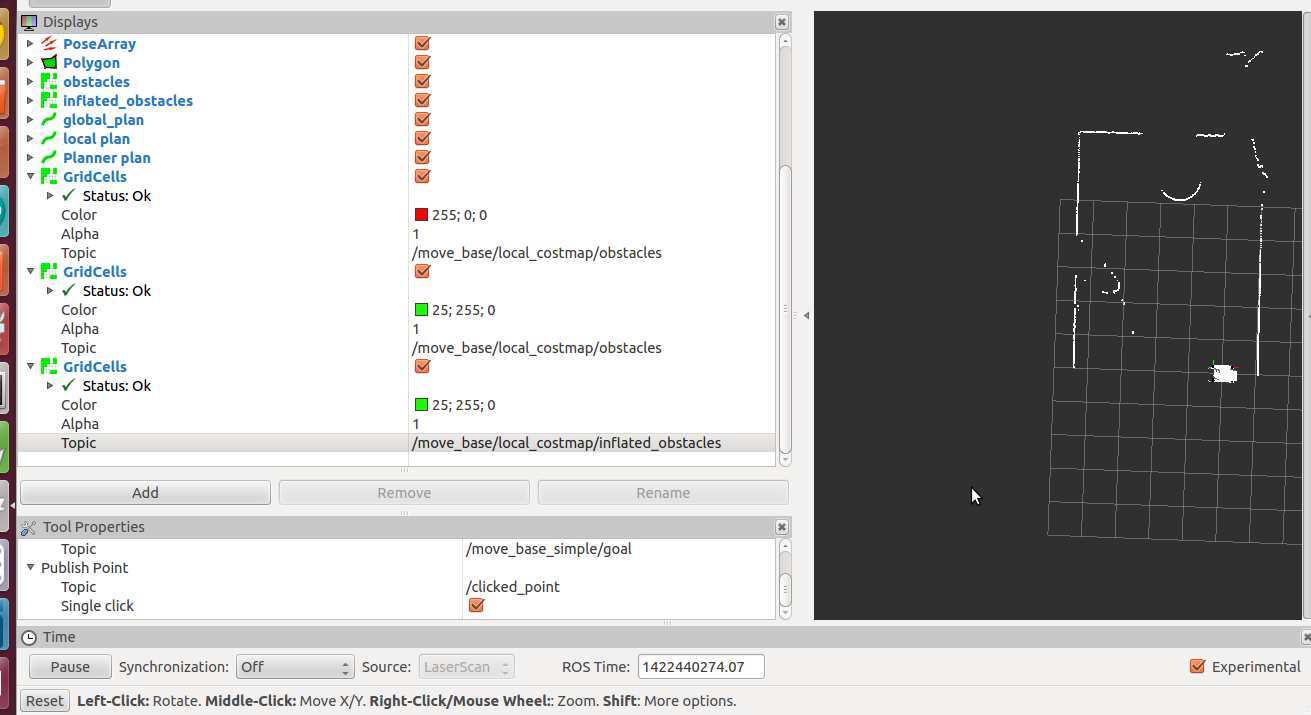
| 2015-03-05 04:07:20 -0500 | marked best answer | costmap begineer question[update] Im using the move_base, there are some topics of local_costmap and Im following a tutorial using grid cell to display the cost on map, but I find nothing as shown below with the rqt_graph What should I do with?
Best, Evoe |
| 2015-03-03 05:35:52 -0500 | received badge | ● Popular Question (source) |
| 2015-02-12 02:17:40 -0500 | received badge | ● Notable Question (source) |
| 2015-02-09 01:14:37 -0500 | commented answer | Odometry jump I tried to change my fixed frame to odom but the "jump" is even more aggressive. Here is the video https://www.youtube.com/watch?v=g9jxh... |
| 2015-02-09 01:11:00 -0500 | received badge | ● Popular Question (source) |
| 2015-02-06 03:11:15 -0500 | asked a question | How to subcribe tf transform from map to odom by gmapping into odom to baselink? Hi, I have an odometry obtained from encoders but it is not accurate enough. In long periods, the error accumulated the robot position not accurate. I know that gmapping publish a tf transform from map to odom. Can I subscribe this transform and add it into my odometry or the transform from odom to baselink so that the position of my robot is more accurate? |
| 2015-02-06 02:25:28 -0500 | asked a question | Odometry jump I am using encoders to calculate the odometry of my mobile robot. However, sometimes the position of robot will suddenly jump. The following video shows how the robot jump: https://www.youtube.com/watch?v=Q2W1q... The encoder_distance topic at 0.39 is the encoder pulse topic. The pulses of the encoders do not jump when the robot jumps. I wonder if the jumping is caused by tf error? Please help me. |
| 2015-02-04 08:24:55 -0500 | received badge | ● Self-Learner (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.