
costmap begineer question[update]
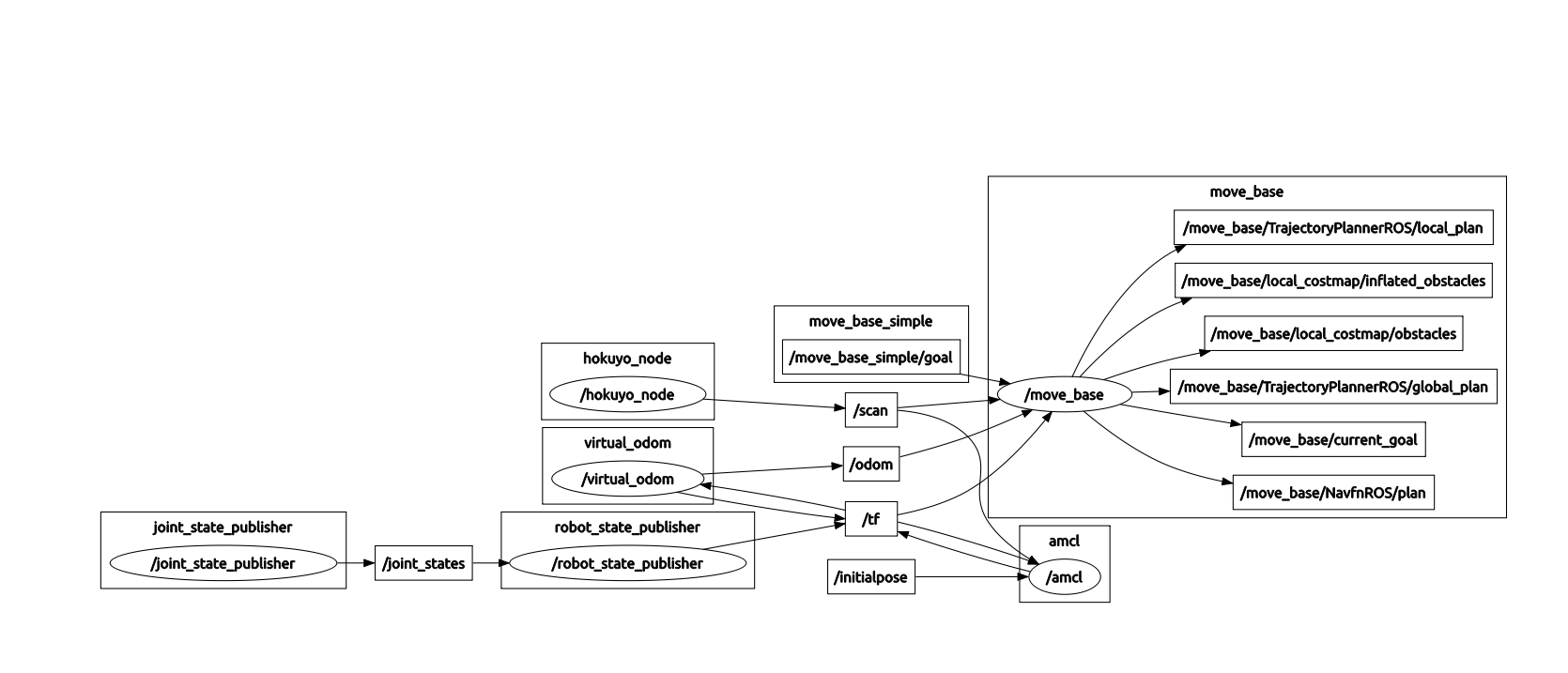
Im using the move_base, there are some topics of local_costmap
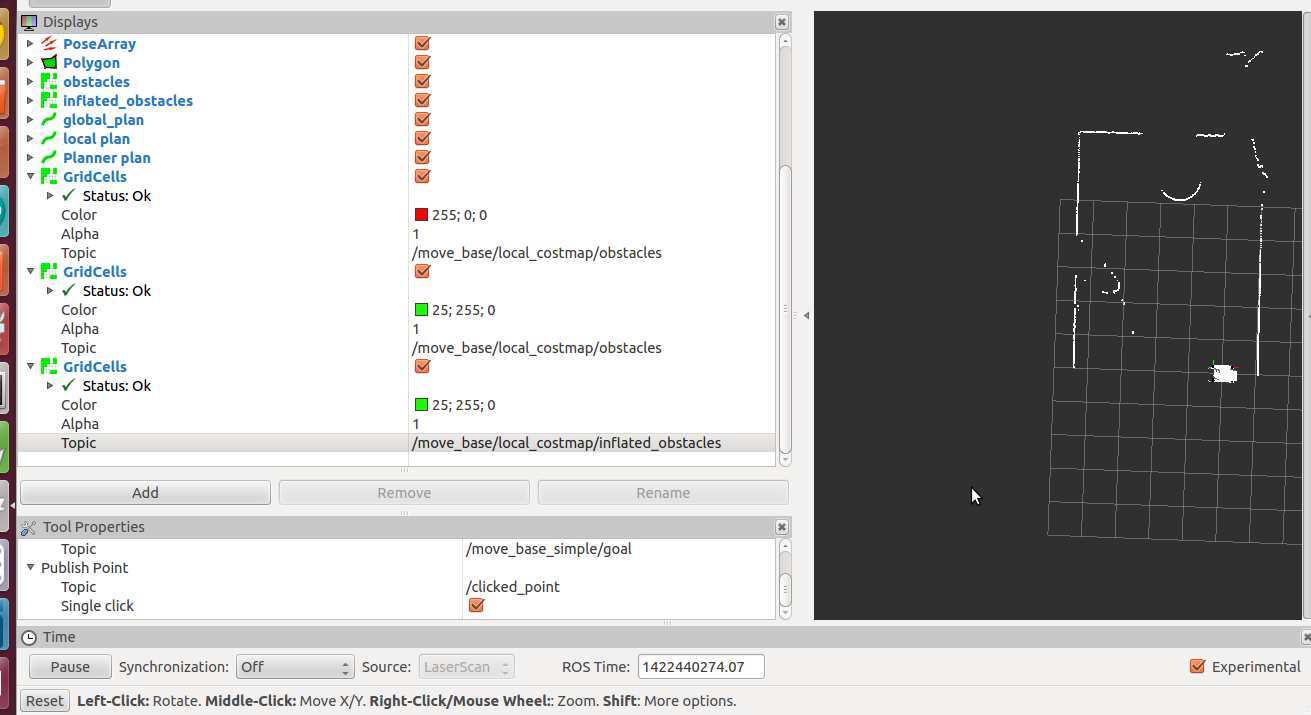
and Im following a tutorial using grid cell to display the cost on map,
but I find nothing as shown below with the rqt_graph
What should I do with?
Best, Evoe


Are you wanting to mark a costmap with your own costs or do you just want to use the costmap to track obstacles and inflation layers?
I want to track obstacles and inflation layers