The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |

| 2018-02-22 07:08:26 -0500 | received badge | ● Taxonomist |
| 2014-01-28 17:23:39 -0500 | marked best answer | installation problem in ROS i tried to install ros in ubuntu 10.04 lucid but when i gave command i got following error: sudo apt-get install ros-electric-desktop-full Reading package lists... Done Building dependency tree Reading state information... Done Some packages could not be installed. This may mean that you have requested an impossible situation or if you are using the unstable distribution that some required packages have not yet been created or been moved out of Incoming. The following information may help to resolve the situation: The following packages have unmet dependencies: ros-electric-desktop-full: Depends: ros-electric-slam-gmapping (= 1.2.5-s1326424166~lucid) but it is not going to be installed Depends: ros-electric-perception-pcl (= 1.0.2-s1323553637~lucid) but it is not going to be installed Depends: ros-electric-simulator-gazebo (= 1.4.10-s1326937730~lucid) but it is not going to be installed Depends: ros-electric-navigation (= 1.6.5-s1323562415~lucid) but it is not going to be installed E: Broken packages what should I do? When I tried to install from the source for the setup command : “sudo apt-get install build-essential python-yaml cmake subversion wget python-setuptools mercurial git-core” I got the following error: Errors were encountered while processing: /var/cache/apt/archives/xz-utils_4.999.9beta+20091116-1_i386.deb /var/cache/apt/archives/patch_2.6-2ubuntu1_i386.deb /var/cache/apt/archives/dpkg-dev_1.15.5.6ubuntu4.5_all.deb /var/cache/apt/archives/build-essential_11.4build1_i386.deb /var/cache/apt/archives/dkms_2.1.1.2-2ubuntu1_all.deb /var/cache/apt/archives/fakeroot_1.14.4-1ubuntu1_i386.deb /var/cache/apt/archives/fglrx_2%3a8.723.1-0ubuntu5_i386.deb /var/cache/apt/archives/fglrx-amdcccle_2%3a8.723.1-0ubuntu5_i386.deb /var/cache/apt/archives/libboost1.42-dev_1.42.0-3~lucid1_i386.deb /var/cache/apt/archives/libboost-dev_1.42.0.1~lucid1_i386.deb /var/cache/apt/archives/libboost-serialization1.42-dev_1.42.0-3~lucid1_i386.deb /var/cache/apt/archives/libboost-date-time1.42-dev_1.42.0-3~lucid1_i386.deb /var/cache/apt/archives/libboost-date-time-dev_1.42.0.1~lucid1_i386.deb /var/cache/apt/archives/libboost-system1.42-dev_1.42.0-3~lucid1_i386.deb /var/cache/apt/archives/libboost-filesystem1.4E: Sub-process /usr/bin/dpkg returned an error code (1) |
| 2014-01-28 17:23:37 -0500 | marked best answer | edge detection how to write a simple Canny edge detection program in ROS? I have done this in VC++. But i'm not getting the program flow in ROS... |
| 2013-03-07 21:21:41 -0500 | received badge | ● Famous Question (source) |
| 2013-03-07 21:21:41 -0500 | received badge | ● Notable Question (source) |
| 2012-12-05 02:54:40 -0500 | received badge | ● Famous Question (source) |
| 2012-12-05 02:54:40 -0500 | received badge | ● Notable Question (source) |
| 2012-12-05 02:54:40 -0500 | received badge | ● Popular Question (source) |
| 2012-10-29 02:07:13 -0500 | received badge | ● Notable Question (source) |
| 2012-10-29 02:07:13 -0500 | received badge | ● Popular Question (source) |
| 2012-10-29 02:07:13 -0500 | received badge | ● Famous Question (source) |
| 2012-09-07 05:19:44 -0500 | received badge | ● Famous Question (source) |
| 2012-09-07 05:19:44 -0500 | received badge | ● Notable Question (source) |
| 2012-08-29 22:59:36 -0500 | received badge | ● Popular Question (source) |
| 2012-08-29 22:59:36 -0500 | received badge | ● Famous Question (source) |
| 2012-08-29 22:59:36 -0500 | received badge | ● Notable Question (source) |
| 2012-08-25 04:44:32 -0500 | received badge | ● Popular Question (source) |
| 2012-08-25 04:44:32 -0500 | received badge | ● Famous Question (source) |
| 2012-08-25 04:44:32 -0500 | received badge | ● Notable Question (source) |
| 2012-06-08 07:47:32 -0500 | received badge | ● Popular Question (source) |
| 2012-05-22 13:05:47 -0500 | received badge | ● Popular Question (source) |
| 2012-04-28 04:07:49 -0500 | commented question | depth mapping using web cameras yes. i need to find depth(distance) in an image. i have done face detection in mono vision. next i will do the same in stereo and find distance the face is located from camera. this is my goal. |
| 2012-04-26 23:16:29 -0500 | commented question | rotated image in rviz when using kinect can u post the image? |
| 2012-04-26 06:48:33 -0500 | commented question | depth mapping using web cameras now i found stereocamera-v4l2-ros-pkg doesnot produce disparity. so suggest me a driver |
| 2012-04-25 19:17:09 -0500 | commented question | depth mapping using web cameras i used uvc_cam driver and i calibrated my web cam with epi 0.25. then i did image_proc for my monocular webcam. i have problem only in stereo disparity mapping. for stereo calibration, epi was 2.5. is that the main problem for not getting disparity map? |
| 2012-04-19 05:34:58 -0500 | asked a question | depth mapping using web cameras i'm working on ROS electric. I have 2 iball web cameras separated with distance 12 cm . i used stereocamera-v4l2-ros-pkg for publishing stereo images. it is publishing on topic stereocamera/leftimage, right image etc. i did camera calibration with epi 2.5. Next i did stereo_image_proc for depth mapping. i'm getting only blank displays in all 3 windows.. can anyone figure out what mistake i'm doing here? what drivers are used normally for this stereo image publishing for disparity? Thank You.. |
| 2012-04-18 18:49:27 -0500 | commented question | output from webcam and usb cam i'm using stereocamera-v4l2-ros-pkg |
| 2012-04-03 02:34:56 -0500 | asked a question | output from webcam and usb cam I'm using Electric on ubuntu 11.10. I have an integrated webcam and 2 usb cameras. When i launch stereo view i'm getting video from webcam and 1 usb cam. I need to stop video from webcam in order to set video from 2 usb cameras. How to do that? |
| 2012-03-29 23:24:37 -0500 | commented answer | reduction in image quality in ROS is it possible to launch stereo view in uvc_cam? |
| 2012-03-29 23:24:37 -0500 | received badge | ● Commentator |
| 2012-03-27 19:59:23 -0500 | commented answer | reduction in image quality in ROS Thank you Eric! I will do |
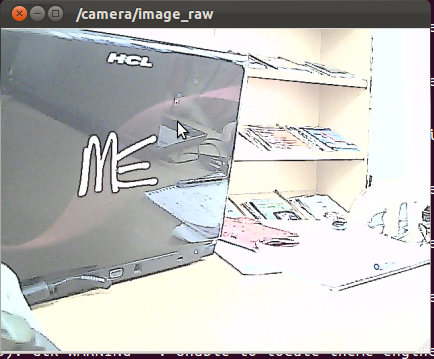
| 2012-03-27 05:25:35 -0500 | marked best answer | reduction in image quality in ROS Hi, I am working on iball 12MP camera in ubuntu . The quality of image is good when i view the video using guvcview software. When i launch the camera.launch file and view raw image, the video quality is degrading badly in the raw image. Has anyone faced the same problem? I'm working on face detection and recognition program, the input video quality is very bad, since the video goes into ROS and OpenCV. The final output also degrades. So please post your views. my launch file i have attatched 2 images from guvcview and uvc_cam driver below
|
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.