
reduction in image quality in ROS

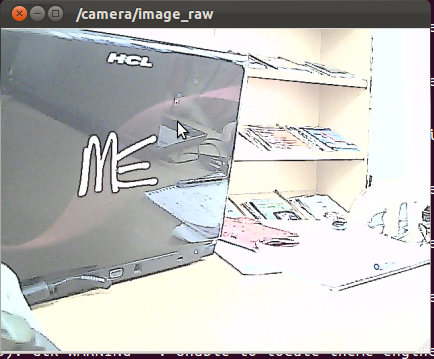
Hi, I am working on iball 12MP camera in ubuntu . The quality of image is good when i view the video using guvcview software. When i launch the camera.launch file and view raw image, the video quality is degrading badly in the raw image. Has anyone faced the same problem? I'm working on face detection and recognition program, the input video quality is very bad, since the video goes into ROS and OpenCV. The final output also degrades. So please post your views.
my launch file
<launch>
<node name="uvc_cam_node" pkg="uvc_cam" type="uvc_cam_node" output="screen">
<param name="device" value="/dev/video0" />
<param name="width" value="640" />
<param name="height" value="480" />
<param name="frame_rate" value="60" />
</node>
</launch>
i have attatched 2 images from guvcview and uvc_cam driver below



What ROS camera driver are you using? What driver parameters?
i'm using the driver given in the link https://github.com/ericperko/uvc_cam
Please update your question to include the camera launch file you are using. When you view it in guvcview, what are the parameters set to (e.g. fps, width, height, auto_exposure) and are they the same in the camera launch file?