The site is read-only. Please transition to use Robotics Stack Exchange
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
| 2016-04-27 02:00:27 -0500 | received badge | ● Famous Question (source) |
| 2016-01-17 17:18:45 -0500 | received badge | ● Good Answer (source) |
| 2014-10-13 23:29:05 -0500 | commented answer | Ubuntu 12.04.2 and openni_launch not detecting Kinect after update? @ish45 assuming you have Ubuntu 12.04 64bit: |
| 2014-09-20 00:06:10 -0500 | received badge | ● Student (source) |
| 2014-09-15 23:39:22 -0500 | commented answer | urdf to lagrangian equations of motion This is great news Martin! |
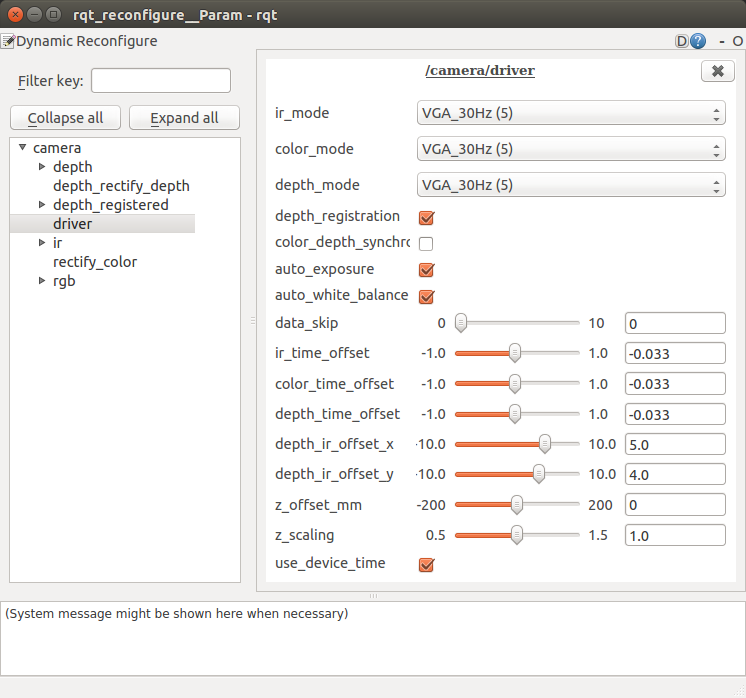
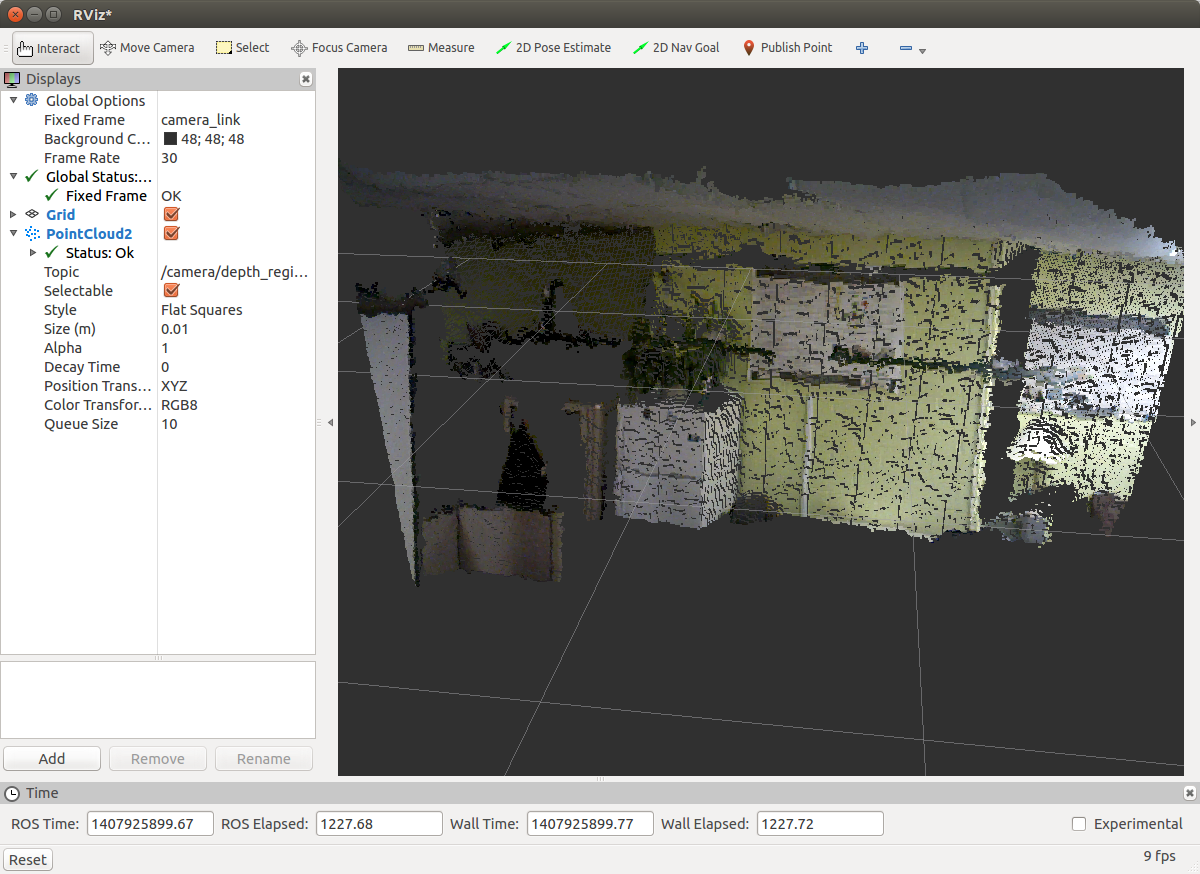
| 2014-08-13 05:33:57 -0500 | answered a question | Openni2 problem with registered depth points
This is because the depth_registration option is not selected. Start rqt_reconfigure Select the driver from the left side and activate the depth_registration option. You should now be able to see the registered rgbd pointcloud in rviz.
|
| 2014-08-13 05:28:22 -0500 | answered a question | Openni2 problem with registered depth points
This is because the depth_registration option is not selected. Start rqt_reconfigure Select the driver from the left side and activate the depth_registration option. You should now be able to see the registered rgbd pointcloud in rviz.
|
| 2014-08-12 18:37:40 -0500 | received badge | ● Notable Question (source) |
| 2014-07-18 21:29:36 -0500 | received badge | ● Famous Question (source) |
| 2014-07-18 21:29:36 -0500 | received badge | ● Notable Question (source) |
| 2014-07-10 09:40:16 -0500 | commented answer | Anyone using the new XBOX One Kinect? Any update on this? |
| 2014-07-09 11:01:46 -0500 | commented question | Gazebo Segfaults in Travis-CI @mbforbes did you ever get this to work? |
| 2014-06-06 03:04:07 -0500 | edited answer | OpenNI/NITE incompatible in Fuerte/Groovy on Precise Since openni.org site has changed recently. You should do the following to do as @pgorczak suggested. You need to install the NiTE v1.5.2.21 middleware from: www.openni.ru/openni-sdk/openni-sdk-history-2 Assuming you extracted the file to your Downloads directory, do the following:
|
| 2014-06-06 03:01:12 -0500 | commented answer | OpenNI/NITE incompatible in Fuerte/Groovy on Precise I saw this too late. Anyway here is a dropbox link of all the downloads I got before they shutdown: www.dropbox.com/sh/jsygeyx8dwa49w6/AAA-XmOWcz9svJBZQ_VKMS3ha Nice find! I edited the answer. |
| 2014-05-29 09:47:24 -0500 | received badge | ● Necromancer (source) |
| 2014-05-17 14:27:32 -0500 | received badge | ● Popular Question (source) |
| 2014-05-16 12:46:37 -0500 | received badge | ● Enthusiast |
| 2014-05-09 15:12:00 -0500 | commented answer | How do I convert a mesh to a pointcloud for use with pcl ICP @ben to my knowledge this just converts vertices in the STL file into points in the point cloud. I am not aware of a tool that resamples points. Did you find any good solution? |
| 2014-05-09 15:08:51 -0500 | commented answer | catkin_make target_link_libraries @rcj1986 please edit the original question when posting updates instead of posting an answer to your own question. Unless this was the answer to your own question. |
| 2014-05-09 15:05:52 -0500 | commented answer | Hydro catkin_make error after update related to libflann If you don't have aptitude, install it: sudo apt-get install aptitude |
| 2014-05-09 15:04:15 -0500 | answered a question | Hydro catkin_make error after update related to libflann This seems to be related to libflann upgraded to 1.8.4-2. The solution was to downgrade libflann. I used aptitude to do this easily. The first time aptitude suggests to remove many packages. Type 'n' for no at the prompt. The second time aptitude suggests keeping libflann at 1.8.4-2. Type 'n' for no at the prompt. The third time aptitude suggests downgrading libflann-dev [1.8.4-2 (now, precise) -> 1.7.1-1 (precise)]. Type 'y' for yes. Here was my terminal output: |
| 2014-05-09 14:55:04 -0500 | asked a question | Hydro catkin_make error after update related to libflann After upgrading the Hydro packages I get the following compile error: |
| 2014-05-04 03:09:08 -0500 | received badge | ● Citizen Patrol (source) |
| 2014-04-26 15:47:05 -0500 | commented answer | OpenNI/NITE incompatible in Fuerte/Groovy on Precise Do you still have this problem? |
| 2014-01-28 17:28:45 -0500 | marked best answer | robot_pose_ekf hardcoded topics and tf Why are "odom", "imu_data" and "base_footprint" hardcoded in robot_pose_ekf? Why not pass these as parameters similar to "odom_combined"? see below:
The above parameters are not currently defined in robot_pose_ekf. |
| 2014-01-19 10:53:37 -0500 | commented answer | OpenNI/NITE incompatible in Fuerte/Groovy on Precise Was your problem resolved @ctguell? |
| 2014-01-19 10:51:19 -0500 | commented answer | OpenNI/NITE incompatible in Fuerte/Groovy on Precise Was this resolved @bit-pirate? |
| 2013-12-18 19:01:25 -0500 | answered a question | How do I convert a mesh to a pointcloud for use with pcl ICP You could do this in ROS Hydro PCL 1.7 if your mesh was a pcl::PolygonMesh: #include <pcl io="" vtk_lib_io.h=""> |
| 2013-11-15 09:35:07 -0500 | received badge | ● Popular Question (source) |
| 2013-10-12 07:23:09 -0500 | received badge | ● Guru (source) |
| 2013-08-06 06:43:09 -0500 | asked a question | pr2_mechanism_model::KinematicHelpers class missing The pr2_mechanism_model::KinematicHelpers class seems to be missing from the pr2_mechanism_model package. Was this moved to another package? This is used in the Coding a realtime Cartesian controller with Eigen tutorial: http://www.ros.org/wiki/pr2_mechanism/Tutorials/Coding%20a%20realtime%20Cartesian%20controller%20with%20Eigen I found the following questions that were not answered: http://comments.gmane.org/gmane.science.robotics.ros.user/7999 http://listarc.com/showthread.php?1780322-Cartesian+controller+tutorial |
| 2013-04-28 00:02:24 -0500 | received badge | ● Great Answer (source) |
| 2013-04-03 16:39:48 -0500 | received badge | ● Good Answer (source) |
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.