
Visualize data during experiment: Gazebo/RVIZ [closed]

My current setup involves
- 3 robots with pandaboards
- a server with camera
The server handles the core and the absolute positioning software running off the camera which publishes the robots' transforms.
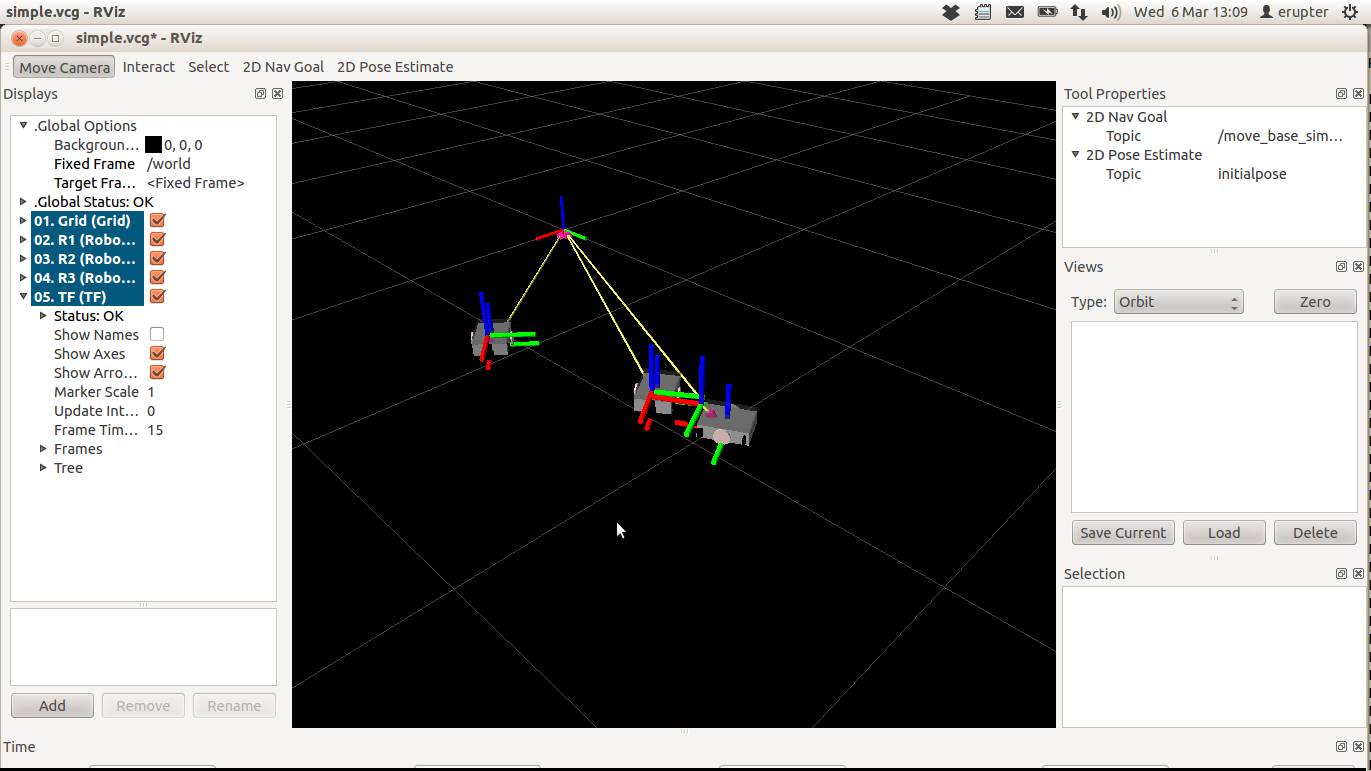
On a laptop I run RVIZ and am able to visualize position and orientation of the robots.
Now what I would like to do is visualize other things like:
- walls
- objects
- objectives
- other data
I would like to visualize the walls (and floor) of the laboratory to get a decent picture, and I would really like a way to see the vectors I send the robots somehow or, having implemented a holonomic controller, I'd really like to see the control point move about in RVIZ to check if the robot is indeed doing what it's supposed to.
How can I achieve this? RVIZ seems limited in term of visualization, while GAZEBO seems suited for simulation but not visualization.
Any other option?

