
Greyed out UR5 in Gazebo + Abnormal Behavior
Specs:
Version of Ubuntu: 20.04
ROS2: Galactic
Kernel version: 5.15.0-76-generic
The problem:
Hey there, ROS newbie here ;-)
I am running a simulation of a UR5 arm in Gazebo, but it is not behaving as expected.
First,
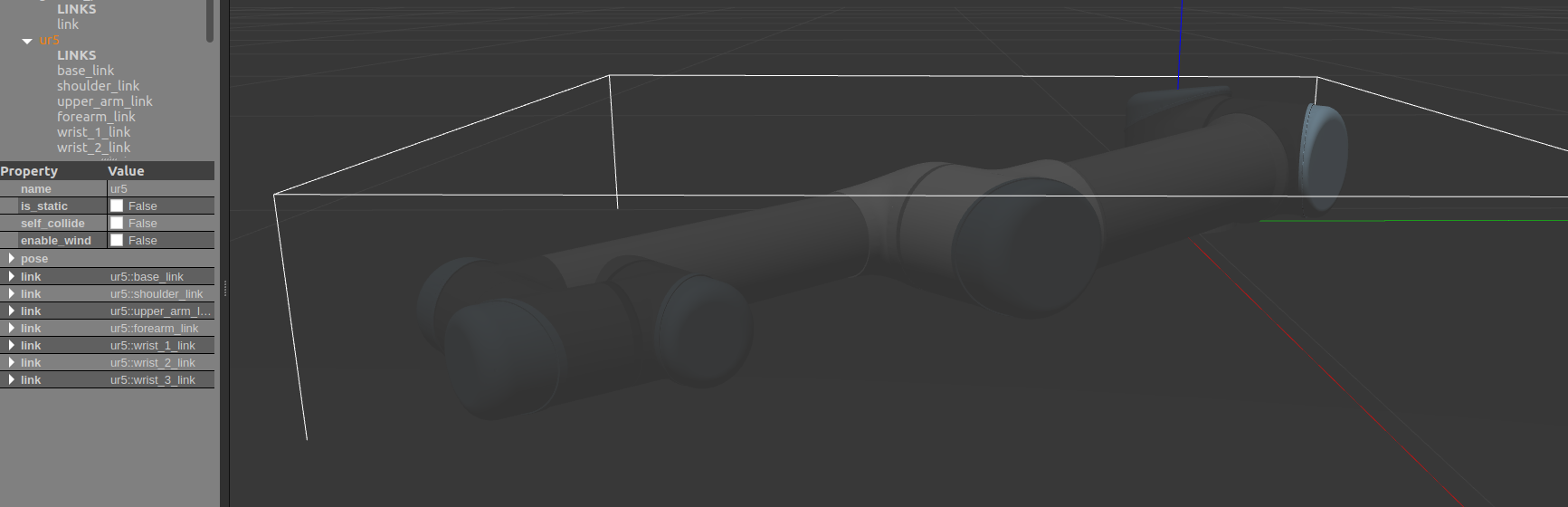
It is greyed out in the simulation, suggesting to me that something is wrong with it, as seen below:
Second,
When I change the value of "pose" inside Gazebo, the robot "spasses out", moving rapidly all over the place, even moving through itself in the process.
It is this "pose" I am talking about:
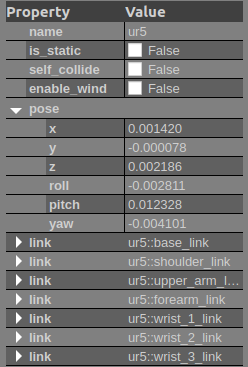
Furthermore, even though the robot moves all over the place, when I click away from the "pose" menu and into it again, the values return to their original state. (If I changed y = 0 to y = 2, it will automatically return to y = 0.)
The same thing happens when I try manipulating the robot using a python script.
The Code
I've only done two main things:
1. Created the '.urdf' file that describes the UR5.
(Link here: https://drive.google.com/file/d/1qbU1...)
2. Created a launch file that opens Gazebo and adds said .urdf file containing the UR5 description.
So I'm wondering if I forgot to do something in order to make things work?
Errors
There are no errors in the terminal when running the code. However, if I terminate using CRTL+C I get the following error:
[ERROR] [gzserver-1]: process has died [pid 7568, exit code -2, cmd 'gzserver -s libgazebo_ros_init.so -s libgazebo_ros_factory.so -s libgazebo_ros_force_system.so '].
[ERROR] [gzclient -2]: process has died [pid 7570, exit code -2, cmd 'gzclient '].
I'm not sure if this is helpful.
Additional comments
I've also tried setting up a Gazebo+UR simulation in ROS Noetic, and what seems to be the exact same problem occures.
(I am not currently sourcing any other version of ROS that Galactic)
