
Nav2 global and local planner conflict
Hello, I'm working with an Ackermann vehicle and using the TEB controller as the local planner (I built it for Foxy) After some tuning, I'm finally getting the vehicle to navigate kind of properly. However, the local planner's path is always different than the global planner's path. This is expected, I assume (but correct me if I'm wrong), but in some complex maneuvers, for example, when involving going in reverse, the path becomes really different and I think the global and local planners are kinda fighting each other. In most cases, the vehicle will make it to the goal but other times it just goes back and forth between the 2 paths and after a while it fails.
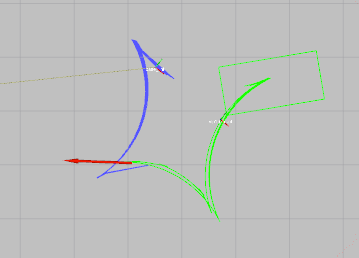
Below is an example of a case where the vehicle needs to reverse first to get to the goal. The good thing is that the paths look symmetrical, which means the 2 planners are using similar kinematic constraints. But, regardless, how can I solve this "conflict"?
Here are my Nav2 params:
amcl:
ros__parameters:
use_sim_time: True
alpha1: 0.2
alpha2: 0.2
alpha3: 0.2
alpha4: 0.2
alpha5: 0.2
base_frame_id: "base_link"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 20.0
laser_min_range: 0.1
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 1
robot_model_type: "differential"
save_pose_rate: 0.5
sigma_hit: 0.2
tf_broadcast: true
transform_tolerance: 1.0
update_min_a: 0.2
update_min_d: 0.25
z_hit: 0.5
z_max: 0.05
z_rand: 0.5
z_short: 0.05
scan_topic: scan
amcl_map_client:
ros__parameters:
use_sim_time: True
amcl_rclcpp_node:
ros__parameters:
use_sim_time: True
bt_navigator:
ros__parameters:
use_sim_time: True
global_frame: map
robot_base_frame: base_link
odom_topic: /odometry/filtered
enable_groot_monitoring: True
groot_zmq_publisher_port: 1666
groot_zmq_server_port: 1667
# default_bt_xml_filename: "navigate_w_replanning_and_recovery.xml"
default_bt_xml_filename: "navigate_w_replanning_and_round_robin_recovery"
# default_bt_xml_filename: "follow_point.xml"
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
bt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: True
controller_server:
ros__parameters:
use_sim_time: True
controller_frequency: 2.0
min_x_velocity_threshold: 0.005
min_y_velocity_threshold: 0.005
min_theta_velocity_threshold: 0.01
failure_tolerance: 0.3
odom_topic: /odometry/filtered
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["goal_checker"]
controller_plugins: ["FollowPath"]
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.05
movement_time_allowance: 10.0
goal_checker:
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.2 # 0.25
yaw_goal_tolerance: 0.1 #0.25
stateful: True
# TEB parameters
# http://wiki.ros.org/teb_local_planner
FollowPath:
plugin: "teb_local_planner::TebLocalPlannerROS"
odom_topic: odom
map_frame: map
# footprint_model.type: circular
# footprint_model.radius: 2.0
footprint_model.type: polygon
footprint_model.vertices: "[ [1.54, 0.405], [1.54, -0.405], [-0.2, -0.405], [-0.2, 0.405] ]"
min_turning_radius: 2.0
wheelbase: 1.35
cmd_angle_instead_rotvel: true # INVESTIGATE MORE!
min_obstacle_dist: 1.0
inflation_dist: 1.0
costmap_converter_plugin: "costmap_converter::CostmapToPolygonsDBSMCCH"
costmap_converter_spin_thread: True
costmap_converter_rate: 15
enable_homotopy_class_planning: True
enable_multithreading: True
optimization_verbose: False
teb_autoresize: True
min_samples: 3
max_samples: 20
max_global_plan_lookahead_dist: 5.0
visualize_hc_graph: True
max_vel_x: 0.75
max_vel_x_backwards: 0.2
max_vel_y: 0.0 # should be zero for non-holonomic robots
acc_lim_y: 0.05
max_vel_theta: 1.0
acc_lim_x: 0.5
acc_lim_theta: 0 ...
