
Unable to execute motion plan in MoveIt 2 and ROS2 controller manager keeps dying

Hello ROS Community,
I am currently working on a project with MoveIt 2 and ROS2 (Humble) and I am facing an issue I can't seem to resolve.
Context:
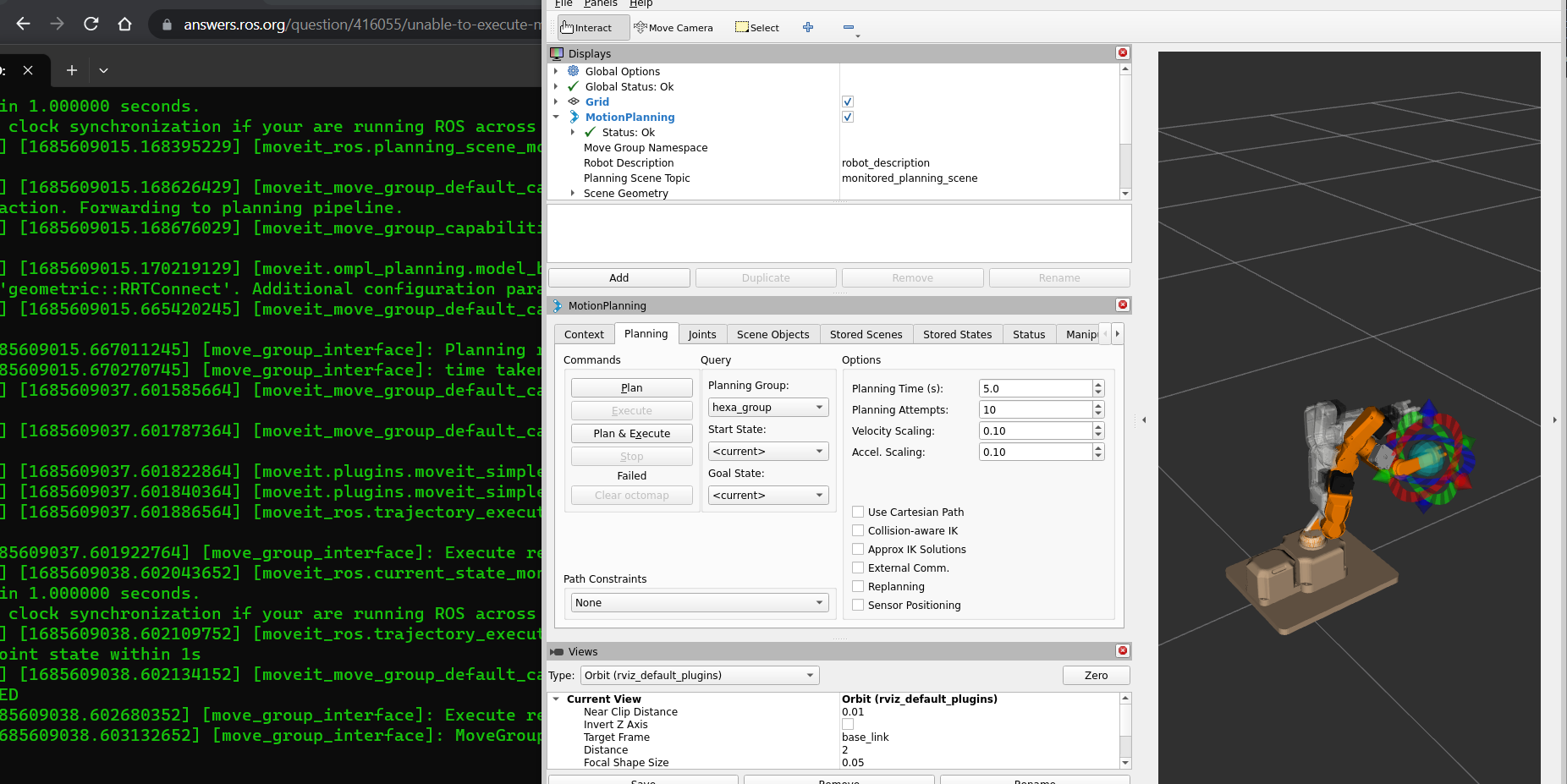
I am running a simulation of a six-jointed robot and using MoveIt 2 for planning. I have successfully created a motion plan for my robot, but when I try to execute the plan, it fails. Additionally, my controller manager keeps dying.

LOG:
roskuttan@SILENT-KILLERED:~/hexa_bot_ws$ ros2 launch hexa_bot_description_moveit_config demo.launch.py use_sim_time:=true
[INFO] [launch]: All log files can be found below /home/roskuttan/.ros/log/2023-05-31-21-33-40-784795-SILENT-KILLERED-11858
[INFO] [launch]: Default logging verbosity is set to INFO
Using load_yaml() directly is deprecated. Use xacro.load_yaml() instead.
[INFO] [static_transform_publisher-1]: process started with pid [11859]
[INFO] [robot_state_publisher-2]: process started with pid [11861]
[INFO] [move_group-3]: process started with pid [11863]
[INFO] [rviz2-4]: process started with pid [11865]
[INFO] [ros2_control_node-5]: process started with pid [11867]
[INFO] [spawner-6]: process started with pid [11869]
[INFO] [spawner-7]: process started with pid [11871]
[static_transform_publisher-1] [INFO] [1685549021.419656555] [static_transform_publisher0]: Spinning until stopped - publishing transform
[static_transform_publisher-1] translation: ('0.000000', '0.000000', '0.000000')
[static_transform_publisher-1] rotation: ('0.000000', '0.000000', '0.000000', '1.000000')
[static_transform_publisher-1] from 'world' to 'base_link'
[ros2_control_node-5] [INFO] [1685549021.428105055] [resource_manager]: Loading hardware 'GazeboSystem'
[ros2_control_node-5] terminate called after throwing an instance of 'pluginlib::LibraryLoadException'
[ros2_control_node-5] what(): According to the loaded plugin descriptions the class gazebo_ros2_control/GazeboSystem with base class type hardware_interface::SystemInterface does not exist. Declared types are fake_components/GenericSystem mock_components/GenericSystem test_hardware_components/TestSystemCommandModes test_hardware_components/TestTwoJointSystem test_system
[ros2_control_node-5] Stack trace (most recent call last):
[ros2_control_node-5] #16 Object "", at 0xffffffffffffffff, in
[ros2_control_node-5] #15 Object "/opt/ros/humble/lib/controller_manager/ros2_control_node", at 0x55bfce760d84, in
[ros2_control_node-5] #14 Object "/usr/lib/x86_64-linux-gnu/libc.so.6", at 0x7f99cabb9e3f, in __libc_start_main
[robot_state_publisher-2] [WARN] [1685549021.429758155] [kdl_parser]: The root link base_link has an inertia specified in the URDF, but KDL does not support a root link with an inertia. As a workaround, you can add an extra dummy link to your URDF.
[ros2_control_node-5] #13 Object "/usr/lib/x86_64-linux-gnu/libc.so.6", at 0x7f99cabb9d8f, in
[ros2_control_node-5] #12 Object "/opt/ros/humble/lib/controller_manager/ros2_control_node", at 0x55bfce76089e, in
[ros2_control_node-5] #11 Object "/opt/ros/humble/lib/libcontroller_manager.so", at 0x7f99cb26d171, in controller_manager::ControllerManager::ControllerManager(std::shared_ptr<rclcpp::Executor>, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, rclcpp::NodeOptions const&)
[ros2_control_node-5] #10 Object "/opt/ros/humble/lib/libcontroller_manager.so", at 0x7f99cb26c257, in controller_manager::ControllerManager::init_resource_manager(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)
[robot_state_publisher-2] [INFO] [1685549021.429863355] [robot_state_publisher]: got segment JAW1_1
[robot_state_publisher-2] [INFO] [1685549021.429918055] [robot_state_publisher]: got segment JAW2_1
[robot_state_publisher-2] [INFO] [1685549021.429927655] [robot_state_publisher]: got segment JAW3_1
[robot_state_publisher-2] [INFO] [1685549021.429934355] [robot_state_publisher]: got segment JAW6_1
[robot_state_publisher-2] [INFO] [1685549021.429940655] [robot_state_publisher]: got segment Jaw4_1
[robot_state_publisher-2] [INFO] [1685549021.429946955] [robot_state_publisher]: got segment Jaw5_1
[robot_state_publisher-2] [INFO] [1685549021.429953255] [robot_state_publisher]: got segment NEMA_3_1
[robot_state_publisher-2] [INFO] [1685549021.429959555] [robot_state_publisher]: got segment NEMA_4_1
[robot_state_publisher-2] [INFO] [1685549021.429965955] [robot_state_publisher]: got segment NEMA_5_1
[robot_state_publisher-2] [INFO] [1685549021.429972355] [robot_state_publisher]: got segment Nema_1_1
[robot_state_publisher-2] [INFO] [1685549021.429978655] [robot_state_publisher]: got segment Nema_2_1 ...


Hello,
Can you please, post your log and screenshot over here, I think you have enough karma to upload images.
I have atttached the log in the drive because i am unable to post the full log here
I have updated your question, I hope it helps you.
ok thank you so much