
Nav2 how to param DWBLocalPlanner to stay on Path
Hello there,
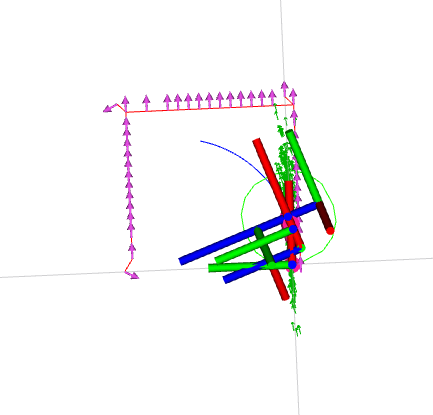
I am currently experimenting with the ROS2 navigation stack and using a Turtlebot3 burger with ROS Humble. I have a simple python script that gives my bot a rudimentary path (see screenshot). The orientation of the points is not correct, I'm aware of this issue. Regardless, my problem now is that the Local Planner which tries to minimize the path costs massively shortcuts the route instead of staying on the path. Is there a way to force the controller to stay on the path as long there are no obstacles ? I have already tried to modify PathAlign.scale and PathAlign.forward_point_distance but i could only see a small improvement even when setting PathAlign.scale to a very high value. Is it possible to disable the local controller alltogether ?
Extract from script:
import rclpy
...
path = navigator.getPathThroughPoses(initial_pose, goals, use_start=False)
navigator.followPath(path)
Screenshot:
The current param file, in my Google Drive.
