Robot and sensor are out of map bounds (Local Costmap- Voxel Layer)

Hi I am at this step footprint step of tutorial of NAV2. However I am configuring for my specific robot. Given that I have different dimensions, range for lidar and map size, I have configured different values for mapping (mapper_params_online_async.yaml) and for the costmaps (nav2_params.yaml)
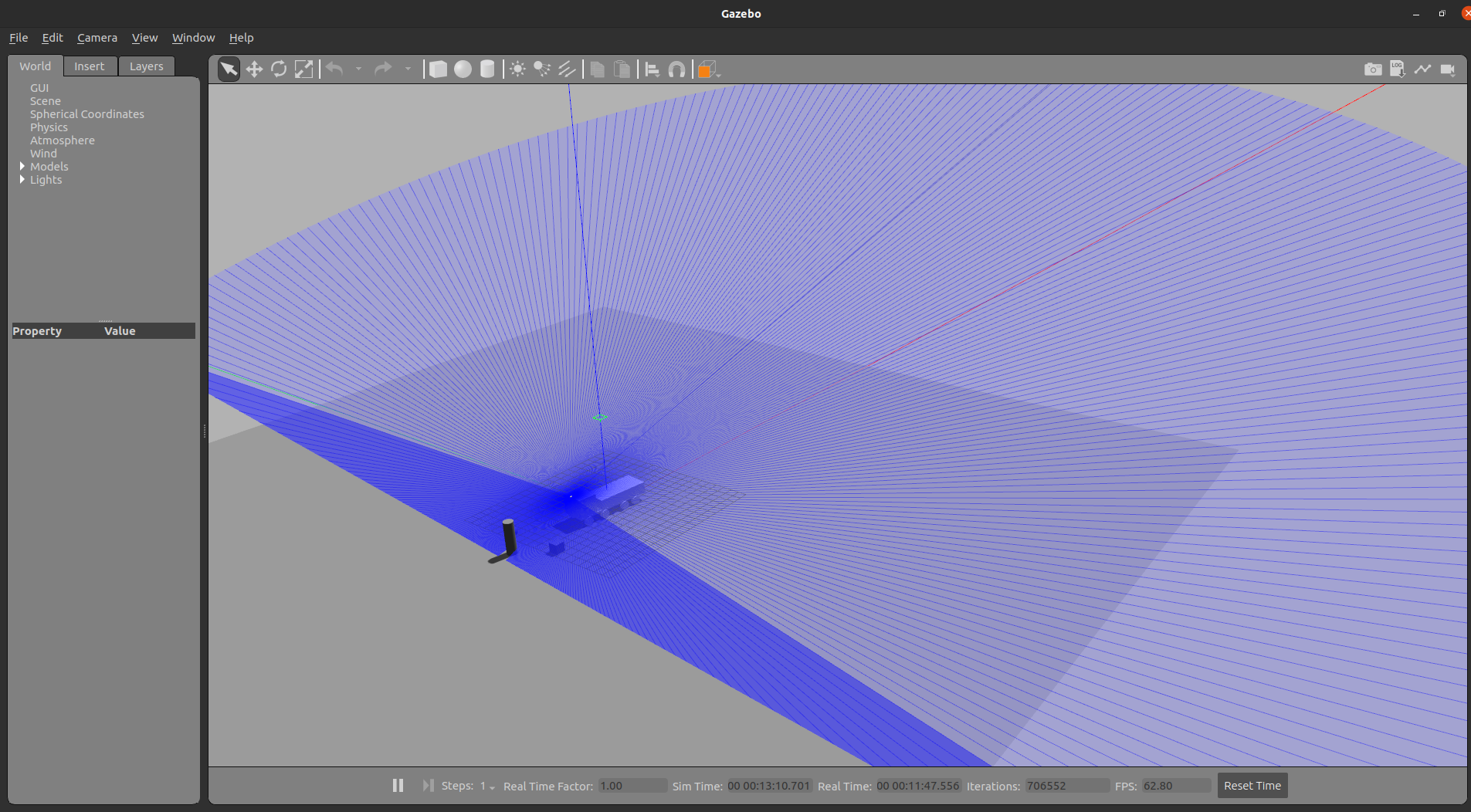
1 - I launch my display.launch file, Rviz and Gazebo is opened properly with the lidar set correctly (at least in terms of Transform and subscribing /scan messages)
2- Secondly I launch the online_async_launch.py launch file and get no errors:
INFO] [launch]: All log files can be found below /home/rota/.ros/log/2023-05-04-19-40-07-815644-NUC-21912
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [async_slam_toolbox_node-1]: process started with pid [21914]
[async_slam_toolbox_node-1] [INFO] [1683240007.920155126] [slam_toolbox]: Node using stack size 40000000
[async_slam_toolbox_node-1] [INFO] [1683240008.344782676] [slam_toolbox]: Using solver plugin solver_plugins::CeresSolver
[async_slam_toolbox_node-1] [INFO] [1683240008.345652180] [slam_toolbox]: CeresSolver: Using SCHUR_JACOBI preconditioner. INFO] [launch]: All log files can be found below /home/rota/.ros/log/2023-05-04-19-40-07-815644-NUC-21912
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [async_slam_toolbox_node-1]: process started with pid [21914]
[async_slam_toolbox_node-1] [INFO] [1683240007.920155126] [slam_toolbox]: Node using stack size 40000000
[async_slam_toolbox_node-1] [INFO] [1683240008.344782676] [slam_toolbox]: Using solver plugin solver_plugins::CeresSolver
[async_slam_toolbox_node-1] [INFO] [1683240008.345652180] [slam_toolbox]: CeresSolver: Using SCHUR_JACOBI preconditioner.
[async_slam_toolbox_node-1] Registering sensor: [Custom Described Lidar]
[async_slam_toolbox_node-1] Registering sensor: [Custom Described Lidar]
3- I launched the navigation_launch.py . Unfortunately in this step the error is raised:
**[planner_server-2] [WARN] [1683239305.550661960] [nav2_costmap_2d]: Robot is out of bounds of the costmap! I checked that this error raises from the costmap voxel plugin function (rows 318-328) : voxel_layer.cpp
I have already changed the following parameters:
- Map size
- Laser Range (from 15 to 100)
- Global and Local Costmap values (resolution, width, height, origin_x, origin_y, maximum height, etc)
I wonder if this costmap error is raised because my lidar is pitched to the ground (Lidar Orientation, Position), so the range in x direction is smaller than at y direction, or is it my Lidar in a too high spot ? over truck's cabin...
Gazebo
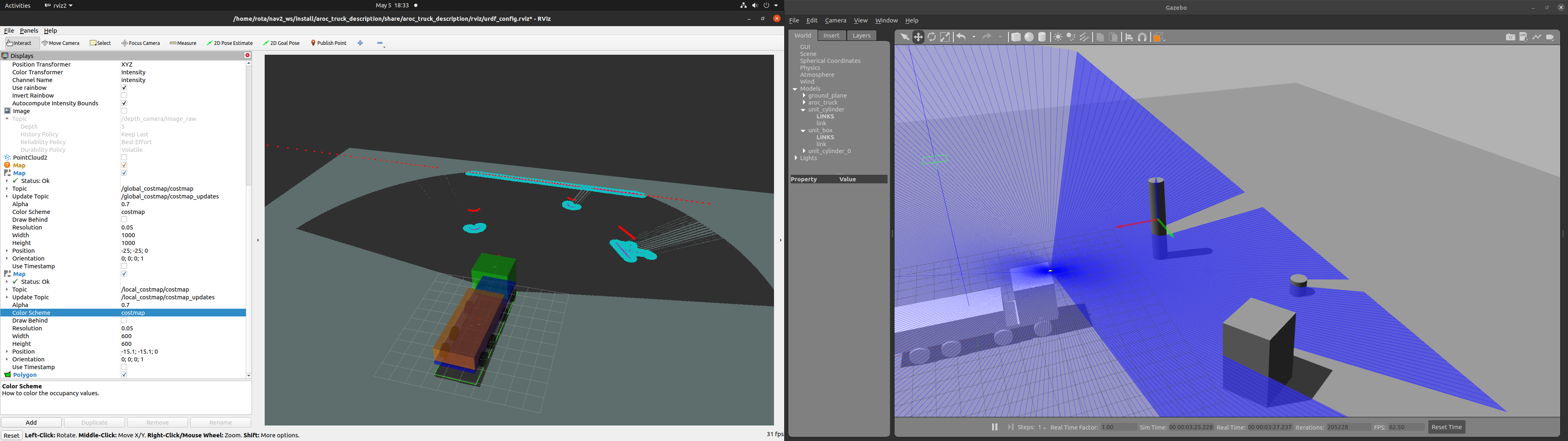
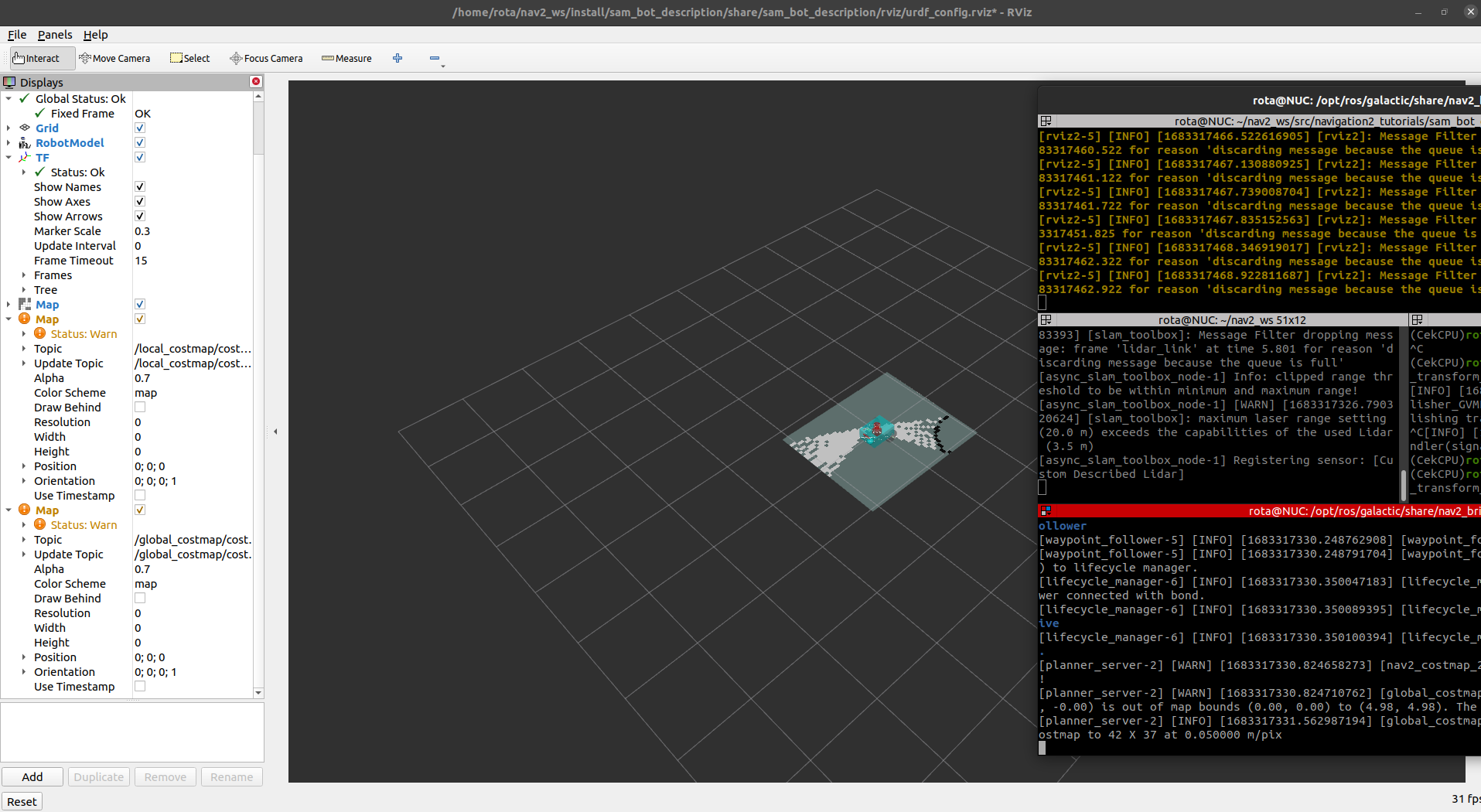
Rviz2
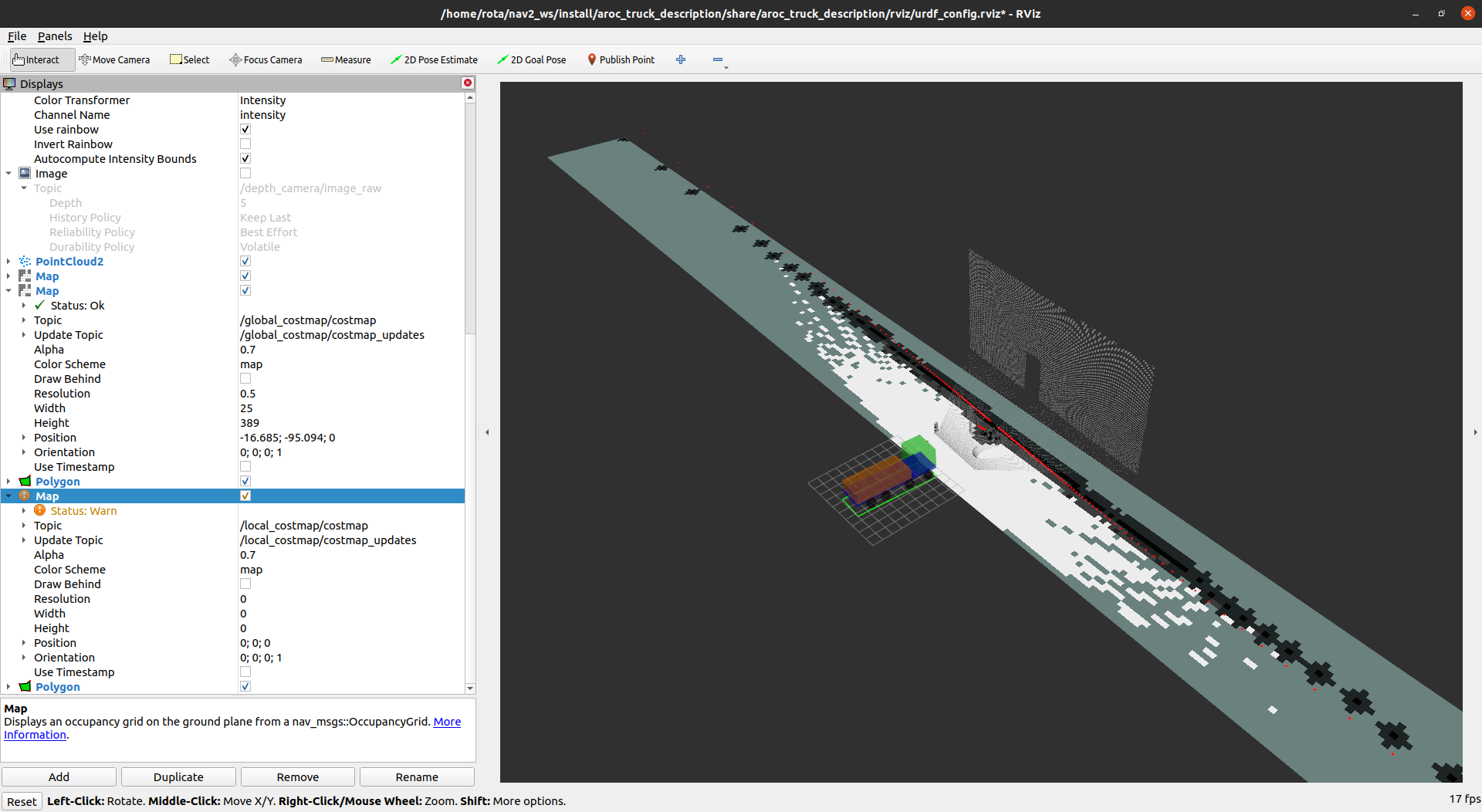
As you can check the global costmap is drawed properly and its footprint as well
However the local costmap is not generated and its respective footprint also not! In this way the path planner won't work well (at least the obstacle avoidance)...since I don't have the local costmap
What can be leading to this error?
Thanks in advance