
getting robot's and frontier landmarks' pose and covariance with gmapping SLAM
I am running gmapping slam on 3 turtlebot3's with frontier_exploration package's frontier_search.cpp running on each turtlebot3's local map. This is what it looks like:
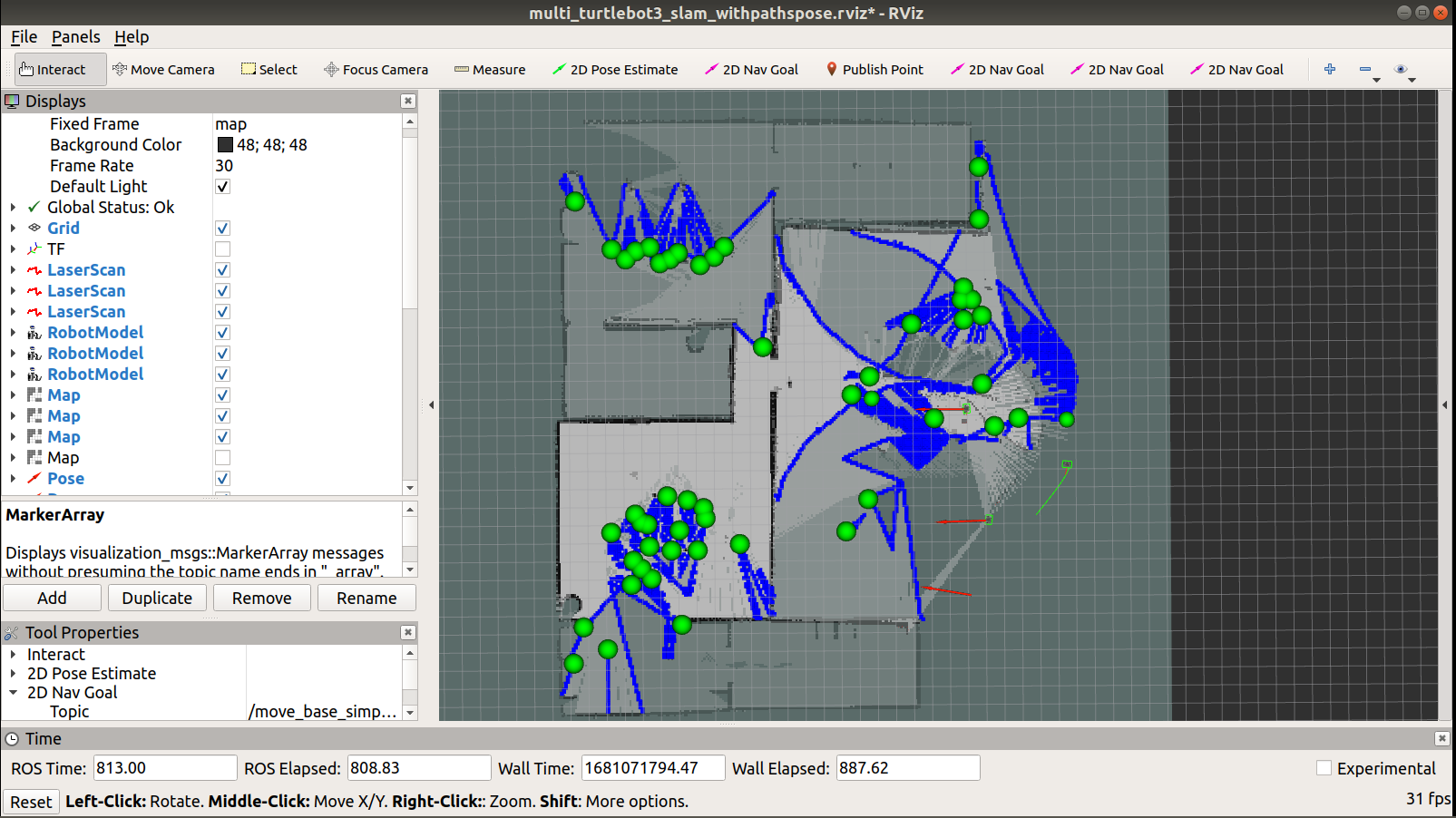
So I have a list of frontiers and frontier centroids for each local map. I want to know the pose and covariance matrix of each turtlebot3 and also the pose and covariance matrix of each frontier centroid (green sphere marker in RViz) in the local map. How can I do this? Is there a way to do this within the gmapping SLAM package? I read about using entropy from the gmapping ros page:
~entropy (std_msgs/Float64)
Estimate of the entropy of the distribution over the robot's pose (a higher value indicates greater uncertainty). New in 1.1.0.
I am unsure how to use this entropy to derive the pose and covariance of the robot and each frontier centroid.
add a comment
