
Start state does not change according to current state
Hi, I'm having trouble controlling a real robot with this package.
The robot can connect and move normally, but the problem is that the robot's start state does not change according to the current state.
Of course I didn't forget to check and change the start state to current already.
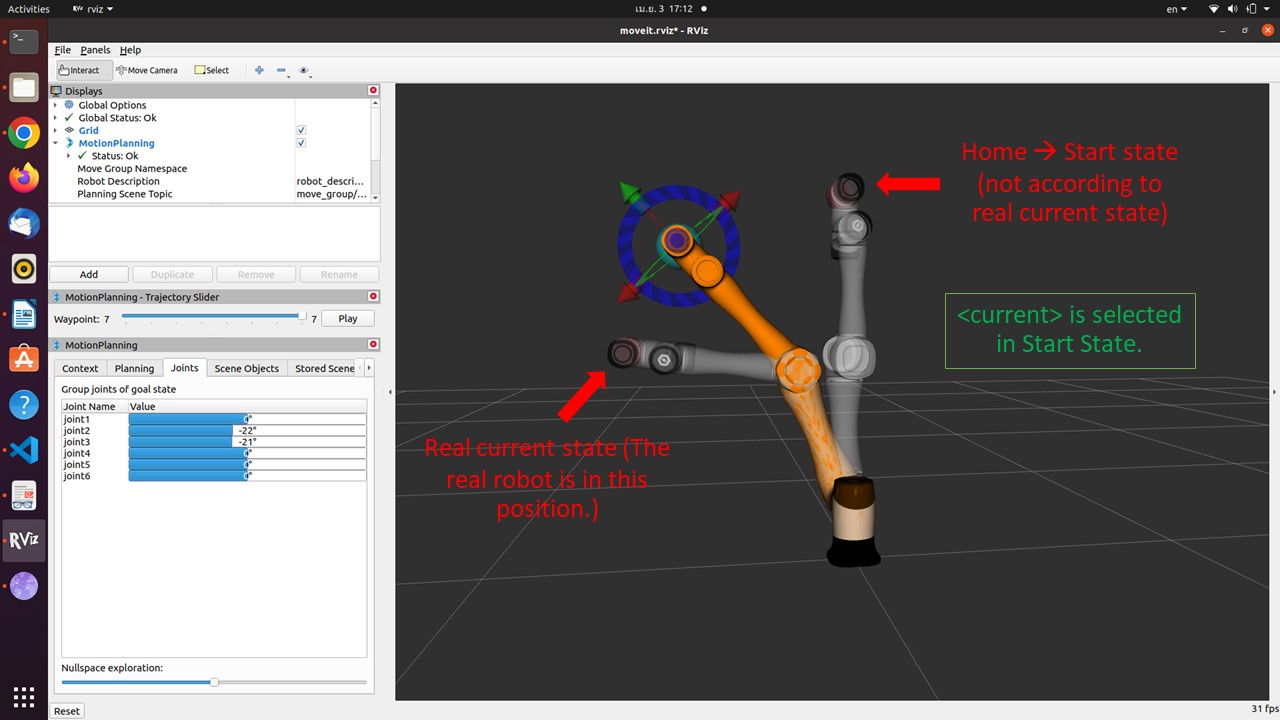
From the picture, when I press plan, the real current status disappears immediately and will start showing movement to the position from the start state (Home pose) instead.
As a result, every time the real robot moves (execute), the state on rviz is incorrect. When changing the trajectory, the real robot will go back to the Home pose first then change to the new position.
This is a problem that I can't switch to other control with. I can't use JointPositionController instead of JointTrajectoryController , because it (joint state) still understands that I am still in Home position.
I want to know what could be the cause. How should I check and where to fix it?
Please help me.
P.S. Thank you all.
