
Mimic tag working in rviz but not in gazebo
Hi everyone, Hi everyone,
I have added a self-designed gripper to the UR5 (mimics are needed because the gripper is based on parallel kinematics). But for some reason this is still not properly visualized in gazebo, however it is visualized correctly in rviz.
Because the latest Q/A I have seen about this topic is is around 2 years ago;
Could somebody confirm to me if this is still a problem?
The result is shown here:
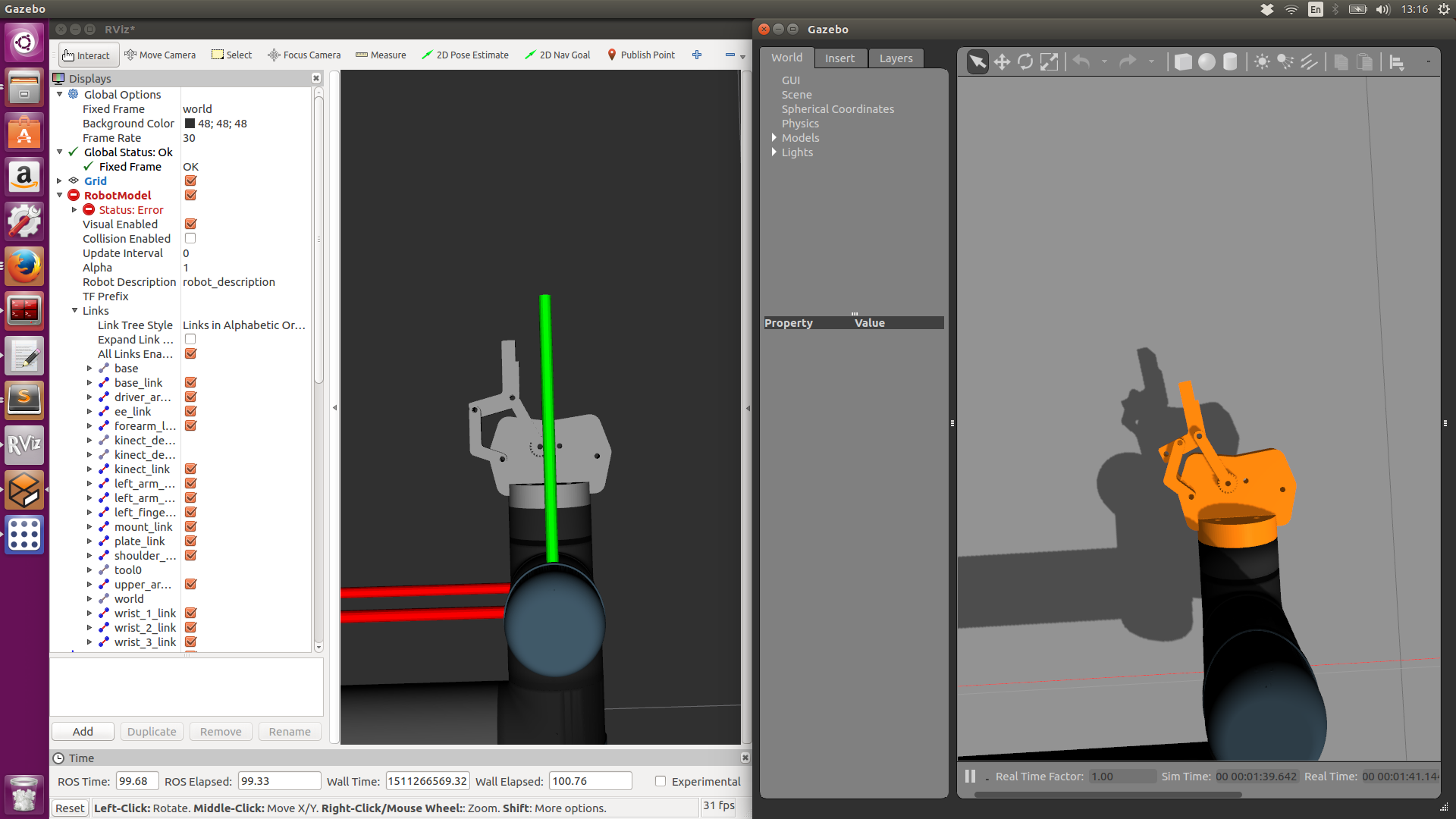
I would be happy to hear what you think!
Thanks in advance, Edwin van Emmerik

I'm having the same problem.
Did you end up solving how to do mimic joints in gazebo properly?
See here: https://answers.ros.org/question/2835...
Hello, you linked to a question I just posted. Did you mean to link to something else?
@Airuno2L No, my simulation was only a test to see if the system was complete. When running the UR5 in real time with a gripper attached, the only thing that needed to be correct was the Rviz. It was so I just decided to go with that.
@Airuno2L I've just submitted my answer to your question. I added the link here so that people would find the answer there later.
I see now Martin. I checked it before the answer showed up. Thanks.