
How can I identify the node/plugin that is broadcasting a specific TF transform in ROS2?
I am currently configuring a mobile base robot model in Xacro and I have created a launch file to spawn two robots into Gazebo. However, my TF tree does not look correct, and I want to clean it up by deactivating the broadcaster that is affecting the "left_wheel" and "right_wheel" frames.
When I run ros2 run rqt_tf_tree rqt_tf_tree, I can see the entire TF tree, but I am unsure how to find the specific broadcaster that is affecting these frames.
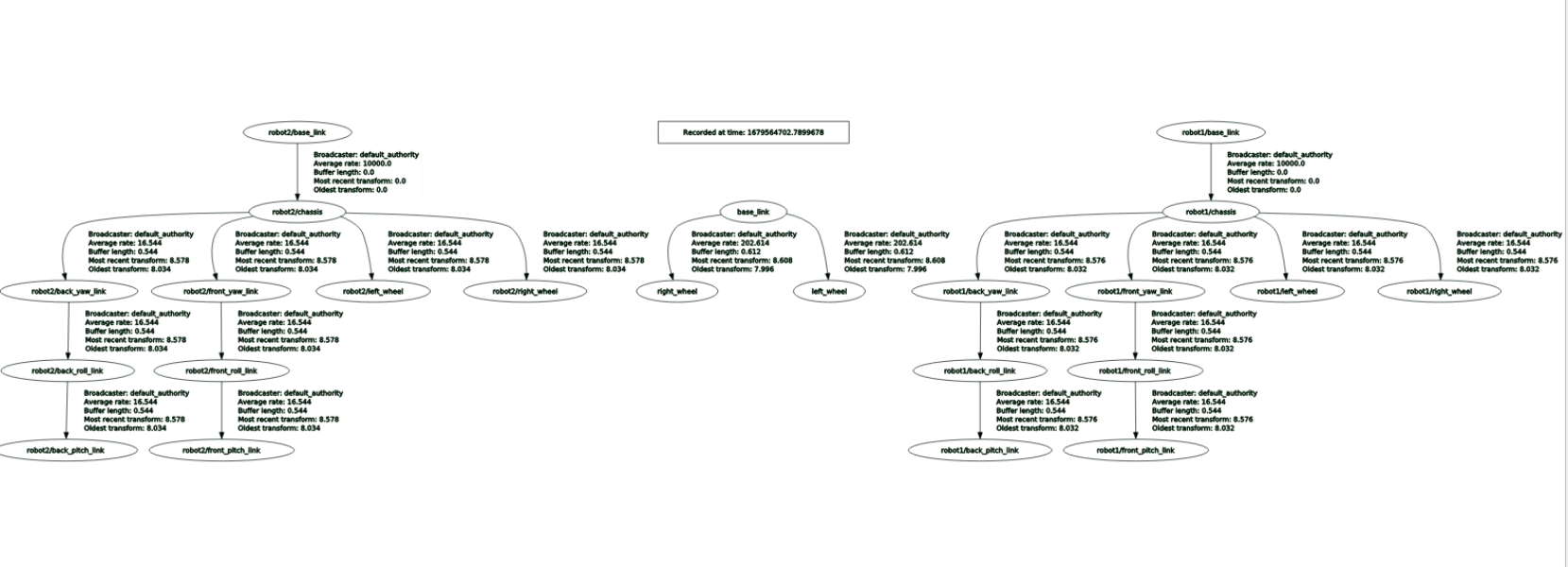
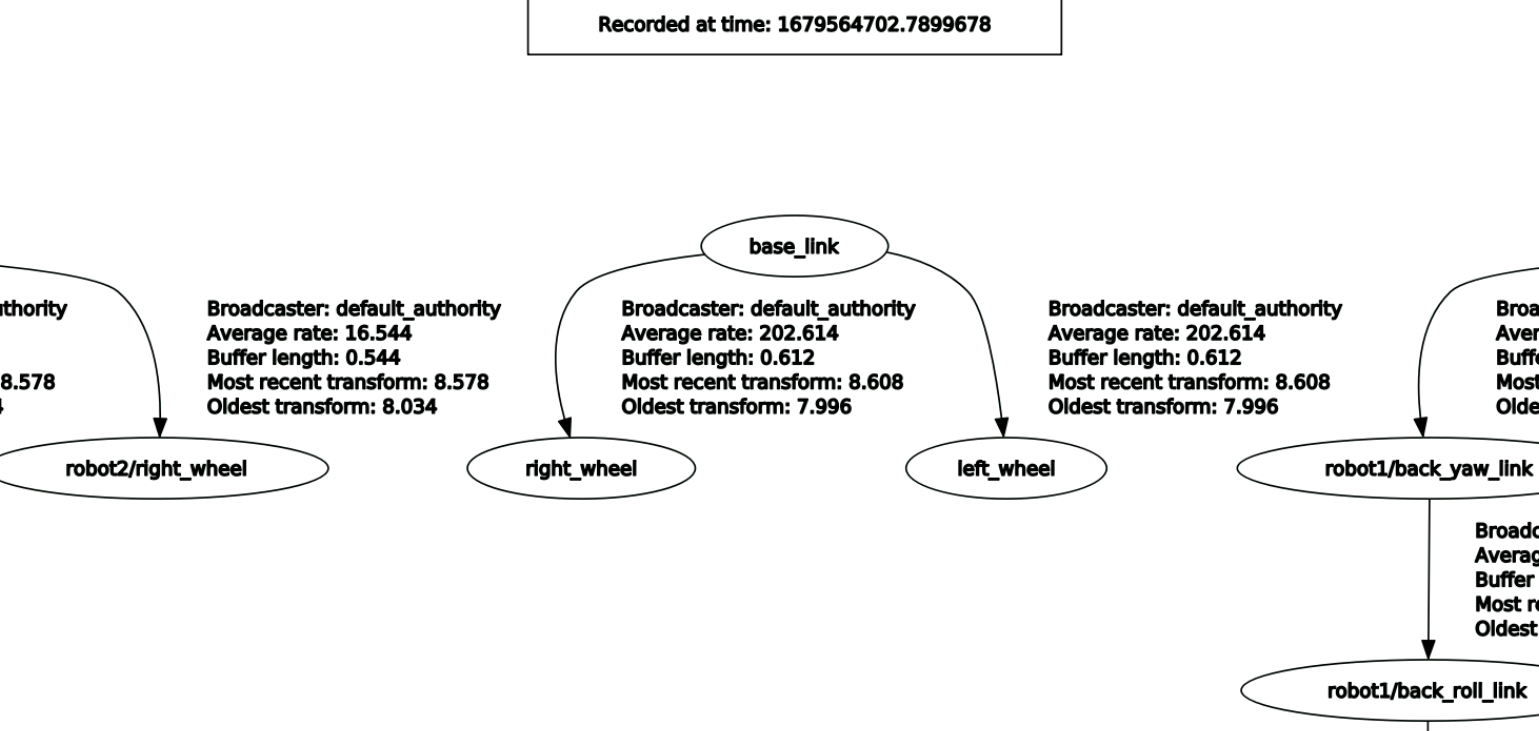
Here is a closeup image:
I have tried using the "tf2_monitor" command in ROS2 (ros2 run tf2_ros tf2_monitor), but it only shows the list of all frames and their publishers. Running ros2 run tf2_ros tf2_echo base_link right_wheel only shows the translation and rotation data, but not the broadcasters. When I run ros2 topic info /tf -v, it only provides general information about the broadcasters and listeners but does not give me the specific information I need. I would appreciate any guidance on how to identify the broadcaster that is affecting the "left_wheel" and "right_wheel" frames.
Thank you,
Roberto
The details, if needed:
ros2 run tf2_ros tf2_monitor
Only shows:
RESULTS: for all Frames
Frames:
Frame: left_wheel, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: right_wheel, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot1/back_pitch_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot1/back_roll_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot1/back_yaw_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot1/chassis, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot1/front_pitch_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot1/front_roll_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot1/front_yaw_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot1/left_wheel, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot1/right_wheel, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot2/back_pitch_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot2/back_roll_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot2/back_yaw_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot2/chassis, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot2/front_pitch_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot2/front_roll_link, published by <no authority available>, Average Delay: 1.67957e+09, Max Delay: 1.67957e+09
Frame: robot2/front_yaw_link ...