
Multi robot navigation in Nav2

Hi,
have tried multi robot navigation with custom robot and maps using ROS 2 ( ROS2 :) ) galactic and Nav2 and navigate_through_poses and follow_waypoints gives below message. robots have base link as <namespace>/base_link. each robot has separate planner, controller, recovery, bt_navigator and costmaps
[bt_navigator-18] Warning: Invalid frame ID "base_link" passed to canTransform argument source_frame - frame does not exist
[bt_navigator-18] at line 156 in /tmp/binarydeb/ros-galactic-tf2-0.17.4/src/buffer_core.cpp
And navigate_to_pose action moves the robot to the position and calls recovery server with below messages
[controller_server-20] [ERROR] [1677631324.152204040] [robot2.controller_server]: Failed to make progress
[controller_server-20] [WARN] [1677631324.152314973] [robot2.controller_server_rclcpp_node]: [follow_path] [ActionServer] Aborting handle.
[controller_server-20] [INFO] [1677631324.170587528] [robot2.local_costmap.local_costmap]: Received request to clear entirely the local_costmap
[controller_server-20] [INFO] [1677631324.171202662] [robot2.controller_server]: Received a goal, begin computing control effort.
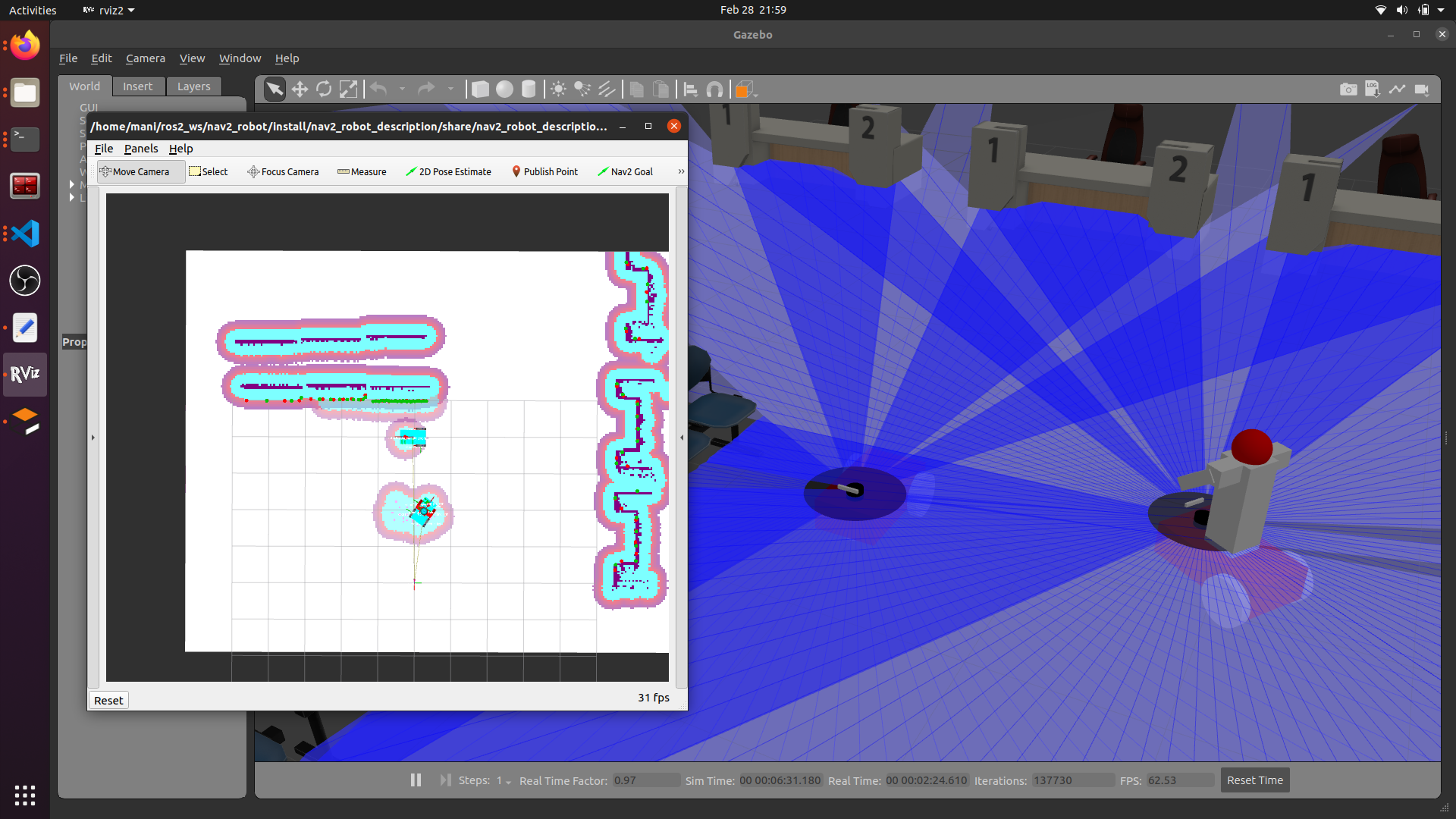
Please find below rviz and gazebo screenshot and let me know if I messed something.
Thanks!
add a comment
