
AMR with mecanum wheels on ROS2 Galactic and Nav2 - stuttering motion & "mousing" around a straight path

Hello,
I have an open question about the possible sources of the scenario mentioned in the title.
My AMR has mecanum wheels and can move omnidirectionally. It has Ubuntu 20.04 and ROS2 Galactic installed as OS in a quite powerful ADlink ROScube, I use Nav2 stack for navigation. I'm having trouble getting the robot to move along straight paths like the picture below:
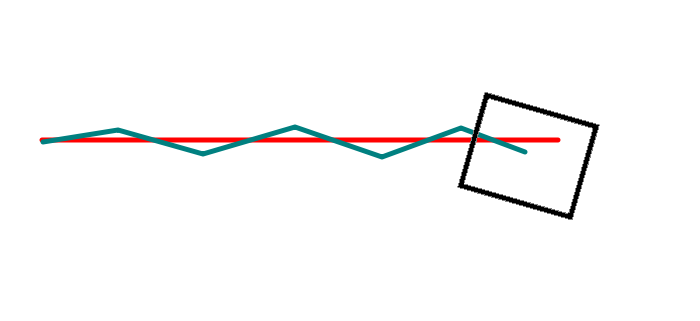
You can see that the robot crosses the path at an angle, and then more than compensates for the difference. What could be the reason(s) for this?
- Lack of processor power to calculate everything in time? (low probability)
- Maybe the frequency of the controller is too low?
- Maybe it's something with the wheels (but the teleop is working properly...)?
Any hints are welcome!
Best,
Łukasz


can you kindly provide more info about your controller.