
Robot pose is off when using robot localization with fused IMU and Odometry
Hello All,
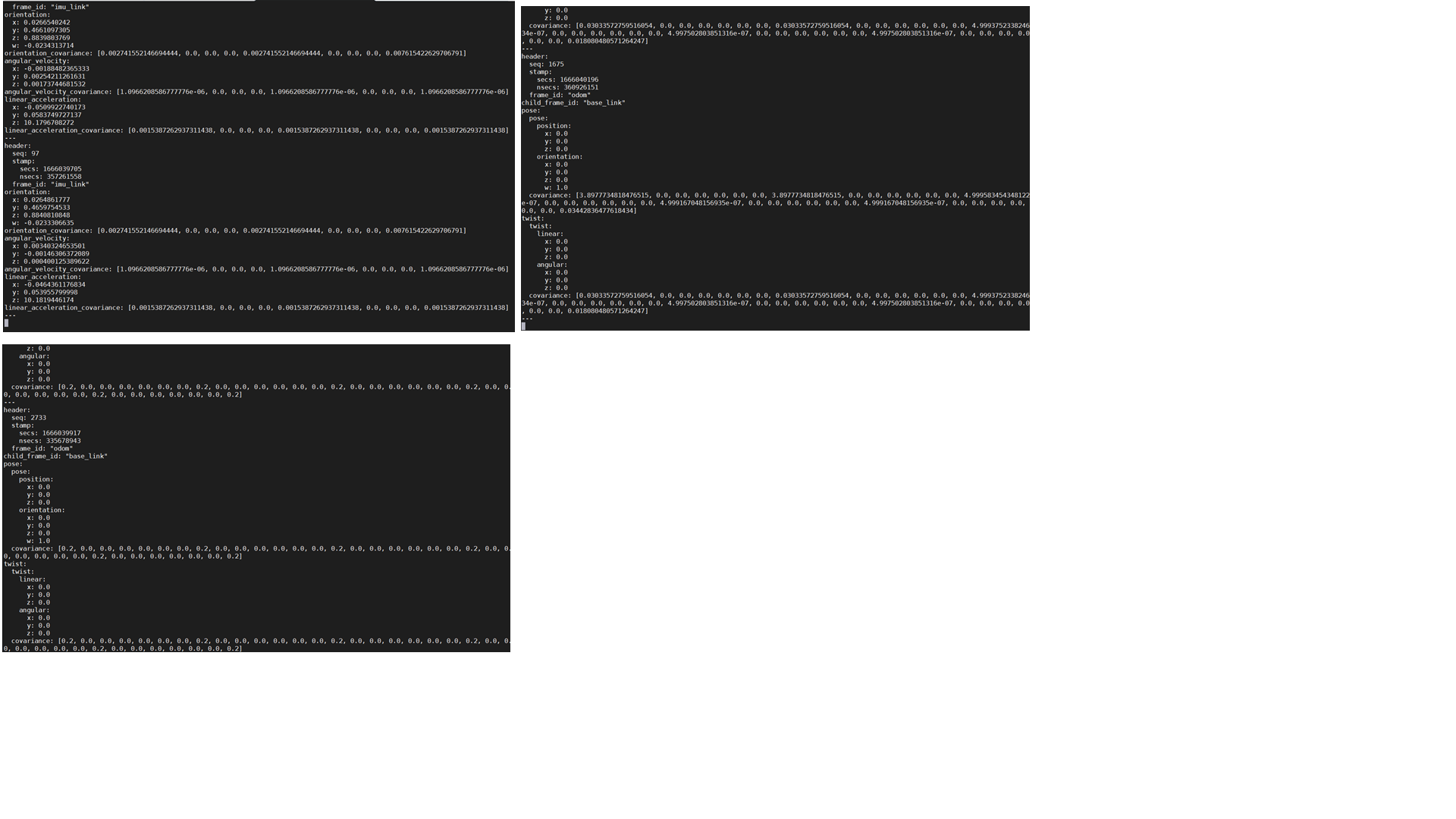
I am working on a 3-wheeled omnidirectional robot and trying to fuse IMU and Odometry using robot localization for better robot pose. My odometry is working well and I verified the axis of the IMUs align physically with the robot odometry, x forward and checked that when the the robot rotates anticlockwise yaw from my topic /imu/rpy is positive. However I am still having problems getting good robot pose while robot is navigating.
The minute the robot rotates along the Z axis, it begins to loose sense of its pose/orientation. In fact oddly enough the robot pose seems better without fusing IMU. Because I want the robot to navigate small areas I really want to get the benefit of better pose by fusing IMU and Odometry. Any thoughts on what I am doing wrong? Also I supposed to stop my odometry nod from publishing base---->odom TF? See my IMU topic, odom topic EKF and AMCL config below:
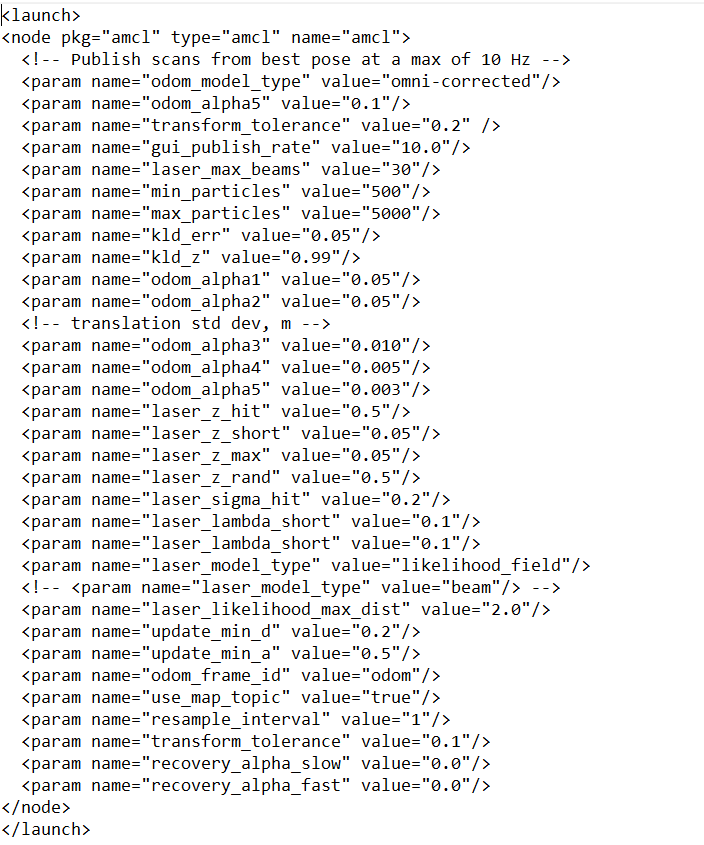
EKF Config
//silent_tf_failure: false
sensor_timeout: 0.1
two_d_mode: true
transform_time_offset: 0.0
transform_timeout: 0.5
print_diagnostics: true
debug: false
debug_out_file: /home/ubuntu/robot_localizationfile.txt
publish_tf: true
publish_acceleration: false
initial_state: [ 1.0, -4.0, 0.0,
0.0, 0.0, 0.0,
0.0, 0.0, 0.0,
0.0, 0.0, 0.0,
0.0, 0.0 0.0]
map_frame: map # Defaults to "map" if unspecified
odom_frame: odom # Defaults to "odom" if unspecified
base_link_frame: base_link # Defaults to "base_link" if unspecified
world_frame: odom # Defaults to the value of odom_frame if unspecified but if map specified USE MAP (Check AMCL)
odom0: /odom
odom0_config: [false, false, false,
false, false, false,
true, true, false,
false, false, true,
false, false, false]
odom0_queue_size: 2
odom0_nodelay: false
odom0_differential: false
odom0_relative: false
odom0_pose_rejection_threshold: 5
odom0_twist_rejection_threshold: 1
imu0: /imu
imu0_config: [false, false, false,
false, false, false,
false, false, false,
false, false, true,
true, true, false]
imu0_differential: false
process_noise_covariance: [0.05, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0.05, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0.06, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0.03, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0.06, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0.025, 0, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0.025, 0, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0.04, 0, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.01, 0, 0, 0, 0,
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0.02, 0 ...
Sorry, may I request you replace images with text? Text is better suited for indexing and may help future readers.