
Footprint not showing correctly
Hey guys I'm trying to create a navigation stack for my AGV. I have got a problem with changing the footprint when I change the estimate pose. I don't know why but the position of platform is changing every sec. Once its staying in basic position and next it move to the estimate position but it never stays at it.
I think the problem may be with connections of topics in my algorithm.
Here is the rqt_graph 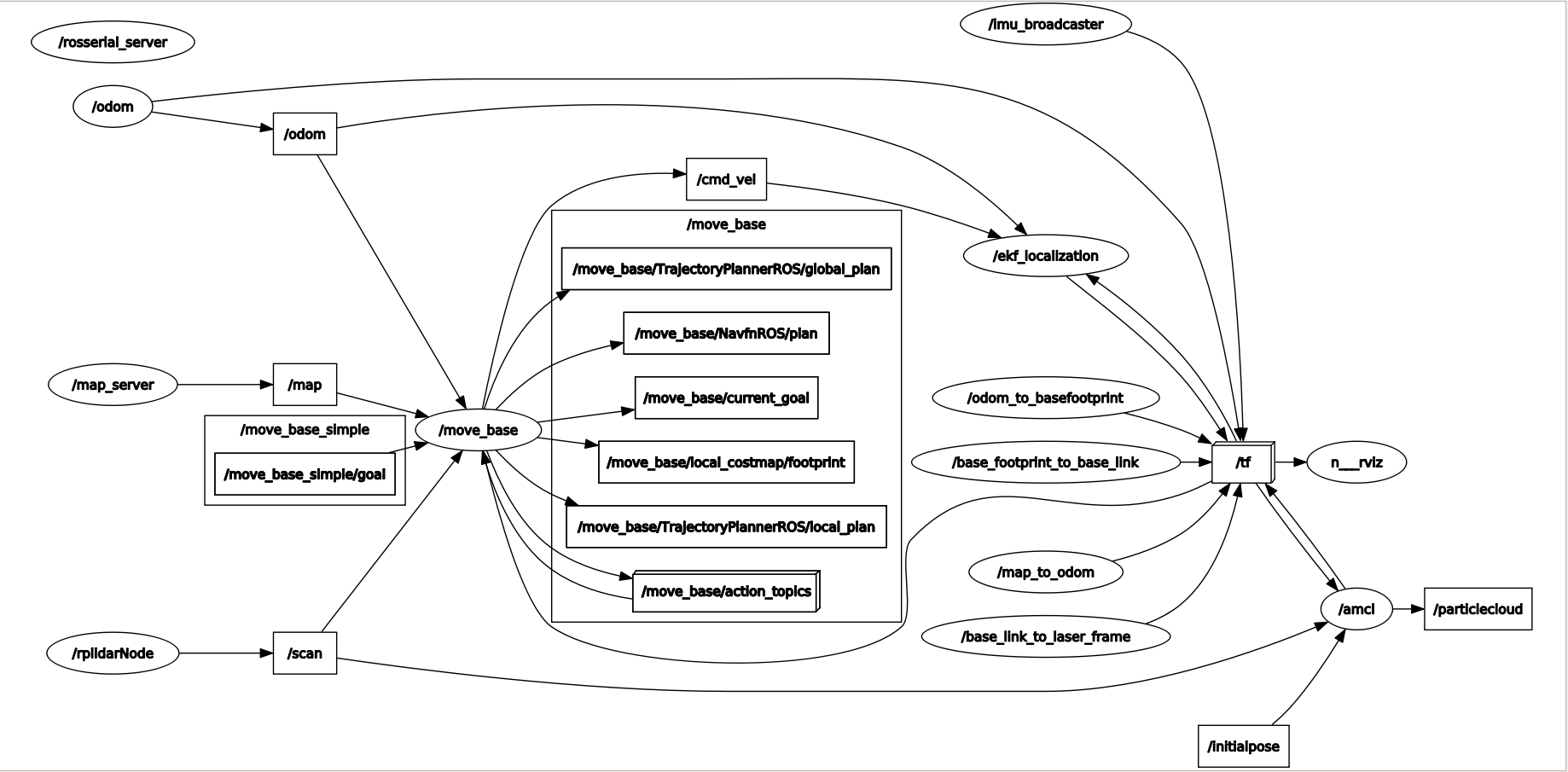
And here it tf tree 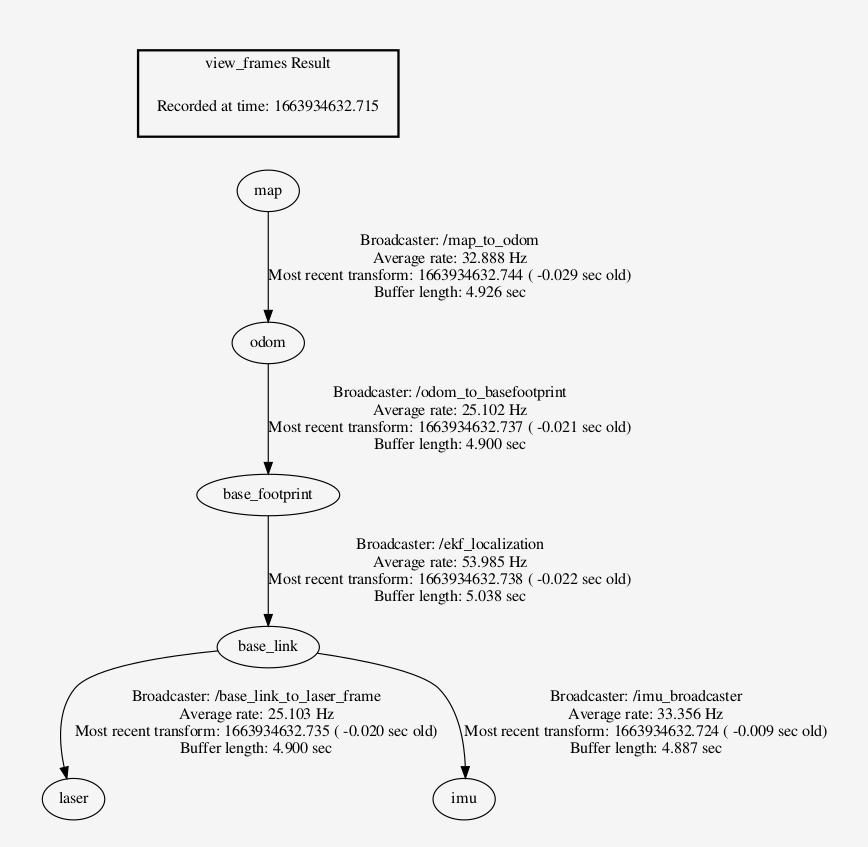
Thank for all the help in advance
EDIT 1 Pictures from rviz
STARTING POSITION OF AGV
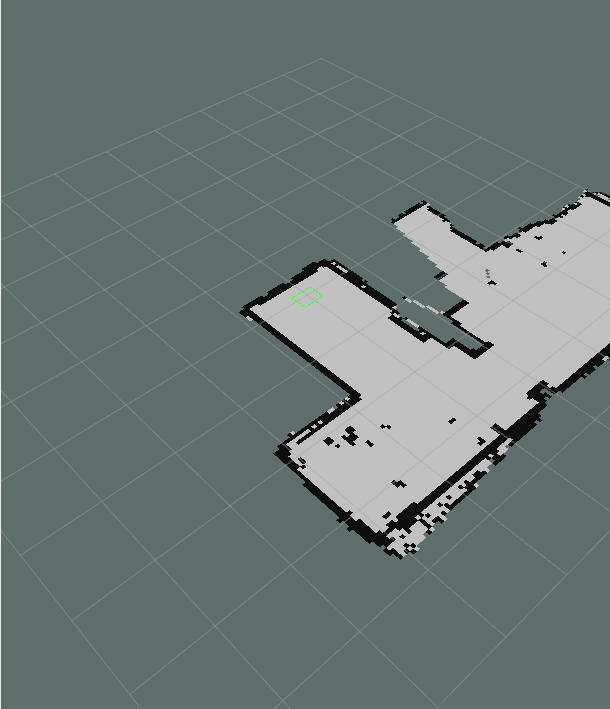
POSE ESTIMATE

CHANGED POSITION
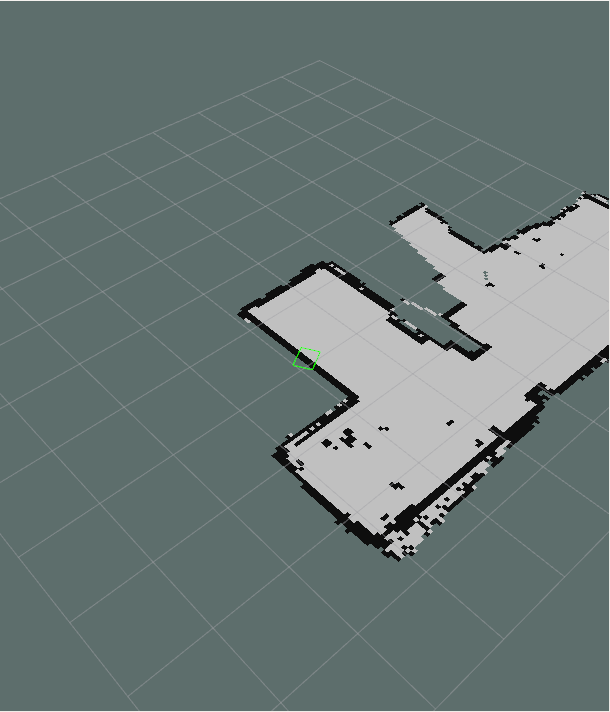
Starting ans changed position are switching every second

When you say 'footprint', are you referring to the tf transform
base_footprintor the projection of the AGV to the floor (defined as a polygon)? What is 'basic position'?When you're using an estimation node like
ekf, which estimates the position of the robot continuously using the information it's getting from the laser and odometry, it will publish an update that may change as the data changes. So you should expect a robot to jump around a little bit even if your localization node is tuned well. Can you quantify just how much it is changing?I don't think the issue is with the connections of your topics.
By footprint I mean the projection of AGV on the floor. The changes of the robot position are not in mm they are in cm. In post I added pictures how far are each positions. Maybe I have got some problem with odometry.