
Invalid TF for multi tb3 setup in nav 2

Hi there,
Am trying to set up a multiple robot simulator in Gazebo with two turtlebots for now. So I came across nav2_bringup and they had the multi_tb3_launch already which I figured I could use.
So I performed the below actions after downloading the binaries:
ros2 launch nav2_bringup multi_tb3_simulation_launch.py headless:=False
I figured since
ros2 launch nav2_bringup tb3_simulation_launch.py headless:=False
the multi-tb3 should work too, but it is not and I am unfortunately unable to figure out what went wrong. By right all the default arguments should work and since the single tb3 sim works, the multi robot sim should work as well, but I feel like I am missing something here.
The launch file is able to launch and two turtlebots are spawning within the gazebo world. However, there is no map shown in Rviz and the error:
[rviz2-4] [INFO] [1662705402.589824264] [robot1.rviz]: Message Filter dropping message: frame 'base_scan' at time 228.963 for reason 'discarding message because the queue is full' [rviz2-15] [INFO] [1662705402.592367879] [robot2.rviz]: Message Filter dropping message: frame 'base_scan' at time 228.964 for reason 'discarding message because the queue is full'
I am confused.
Edit 1: Upon further investigation, I realized that there is no proper tf going on:
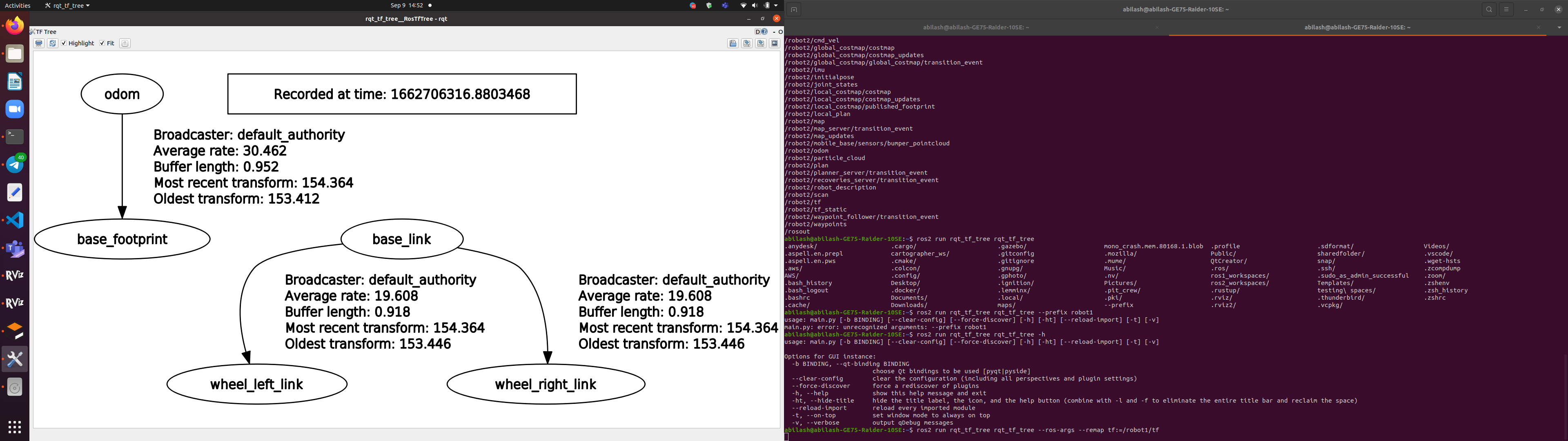
Furthermore, realized map_server was not publishing anything at all. But there is no error or warning for map_server and the node is alive. I passed an argument to the mapfile and it still didn't work.
