
UR3e does not move to ROS commands
I am working on ROS2 Foxy, my network setup is UR3e (192.168.0.4) > router > PC (Ubuntu with IP 192.168.0.2 and another network for docker with IP 172.17.0.1) > ROS2 (through docker with IP 172.17.0.2)
I set up host IP on the robot 192.168.0.2, and robot’s IP 192.168.0.4
I installed the external control urcap
I tried with both enable/disable remote control, and with both local/remote control on teach pendant
Firewall is disabled (sudo ufw status: inactive)
I run
ros2 launch ur_bringup ur_control.launch.py ur_type:=ur3e robot_ip:=192.168.0.4 launch_rviz:=false reverse_ip:=192.168.0.2 limited:=trueon one terminal andros2 launch ur_bringup ur_moveit.launch.py ur_type:=ur3e robot_ip:=192.168.0.4 launch_rviz:=true reverse_ip:=192.168.0.2on another terminal.
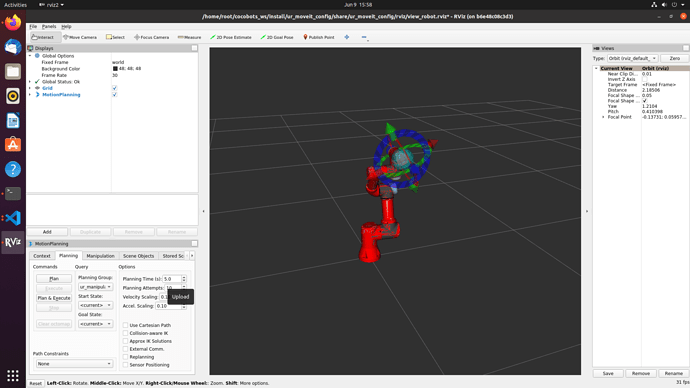
After that, I run the program on the teach pendant of the robot with the external control (with the correct IP), but the robot's state appears red which means "state in collision" no matter where I move the robot. This causes it to fail plan and execute a trajectory.
Alternatively, instead of the moveit launch file, I run this:
ros2 launch ur_bringup test_joint_trajectory_controller.launch.py
And the robot does not move, without any error indication.
Any idea what's the culprit and how to fix it?
Attached is a moveit screenshot
Thank you for your time,


Note, this is probably a double post of https://forum.universal-robots.com/t/...