
Create3, wheel transform in Gazebo classic
Hi,
I have installed the Create3 simulation stack. In particular these are the "heads":
create3_sim: commit d8a6919d7d5df4d1dce8fe9978fe156080a60d0b (HEAD -> main, origin/main, origin/HEAD) irobot_create_msgs: commit dbc85d9a91d105799d983569796cf1a9ff2fc34d (HEAD, tag: 1.2.4, origin/main, origin/galactic, origin/HEAD, main)
When I launch a simulation in Gazebo classic (empty world):
ros2 launch irobot_create_gazebo_bringup create3_gazebo.launch.py
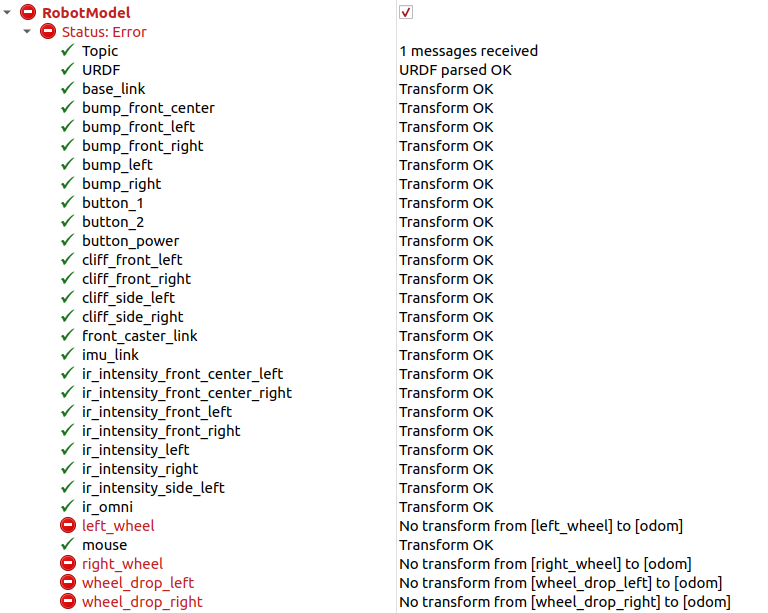
Rviz complains about the wheels (left/right) frames not being related to odom (see the attached picture). Taking a look to the xacro files I can see that they are related to base_link as confirmed by the transform tree obtained by the following command:
ros2 run tf2_tools view_frames
Furthermore I can see that the relation seems to be there (odom->base_link + base_link->left_wheel - I am not reporting the intermediate links with drop_wheel_[left|right] to keep it simpler):
ros2 run tf2_ros tf2_echo odom base_link ====> ODOM -> BASE_LINK
At time 82.29000000
- Translation: [-0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, -0.000, 1.000]
ros2 run tf2_ros tf2_echo base_link left_wheel ====> BASE_LINK -> LEFT_WHEEL
- Translation: [0.000, 0.117, 0.040]
- Rotation: in Quaternion [-0.707, 0.000, 0.000, 0.707]
At time 1651430929.241857047
- Translation: [0.000, 0.117, 0.040]
- Rotation: in Quaternion [-0.707, 0.000, 0.000, 0.707]
At time 1651430930.241933452
- Translation: [0.000, 0.117, 0.040]
- Rotation: in Quaternion [-0.707, 0.000, 0.000, 0.707]
But when trying to get the direct relation, I get:
ros2 run tf2_ros tf2_echo odom left_wheel
[INFO] [1651433130.773527298] [tf2_echo]: Waiting for transform odom -> left_wheel: Lookup would require extrapolation into the past. Requested time 22.035000 but the earliest data is at time 1651433128.812717, when looking up transform from frame [left_wheel] to frame [odom]
Where the 'weird' timestamp is the actual epoch time when I ran the simulation.
Looking at this and that, it seems that not all the nodes are set to use the sim time: I have tried to add in the gazebo_params.yaml file the parameter: gazebo:
ros__parameters:
publish_rate: 62.0
use_sim_time: True
But that doesn't help. From what I see the file irobot_create_control/share/irobot_create_control/config/control.yaml has it already set. Trying to set it in irobot_create_common/irobot_create_common_bringup/config/wheel_status_params.yaml doesn't help either...
Do you have any suggestion?
Thanks for the attention

{kind=link}