
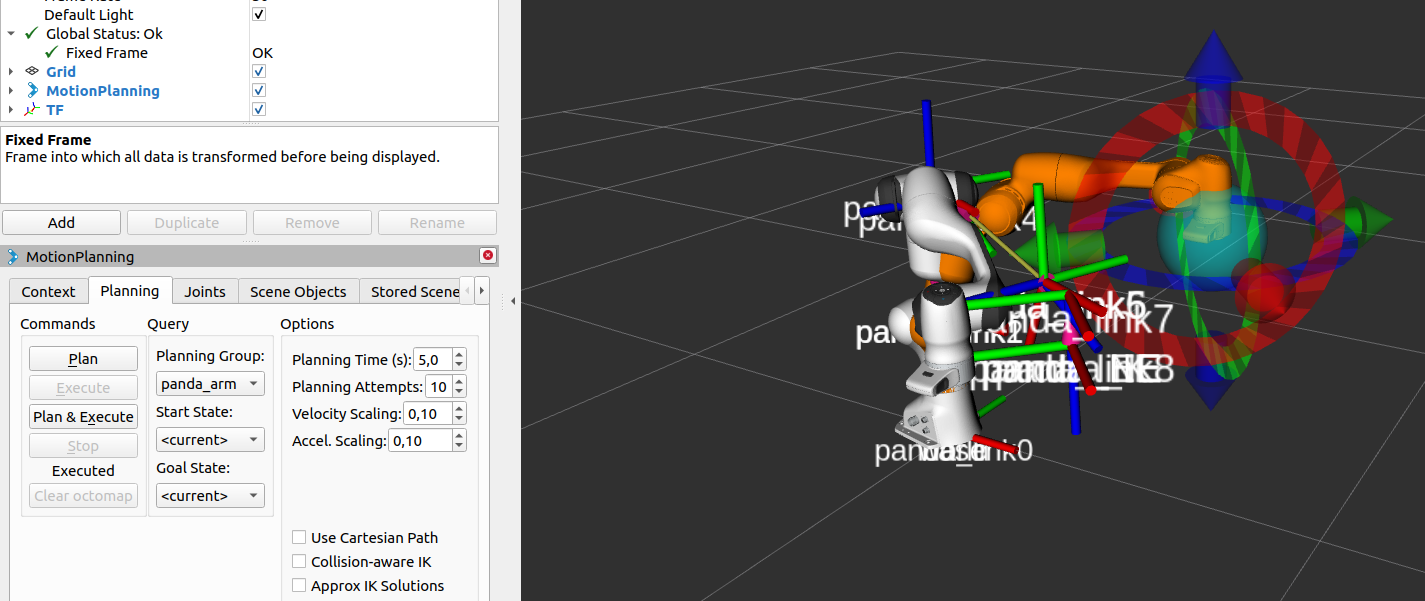
MoveIt! MotionPlanning plugin does not update the start state

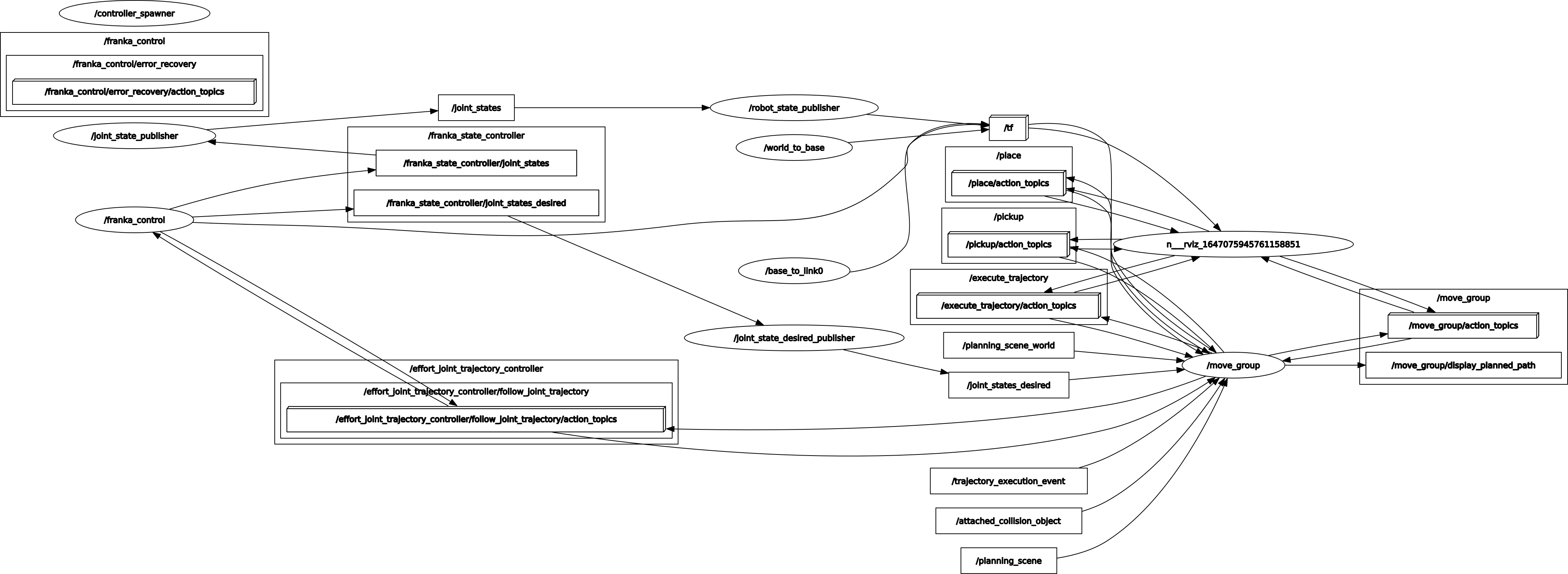
Hi, I have set the effort_joint_trajectory_controller with the official panda_moveit_config and franka_ros packages. When I test it with MotionPlanning Rviz plugin, the Start State of the robot is updated only once right after launching the plugin and thereafter it is not. In other words, after moving the robot, the Start State remains the same and it differs from tf, which is correct and same as the physical robot. The problem is not happening when I am using position_joint_trajectory_controller. I am guessing that I forgot to change the topic name somewhere, but cannot find anything.
My panda_moveit_config/config/panda_controllers/:
controller_list:
- name: effort_joint_trajectory_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
joints:
- panda_joint1
- panda_joint2
- panda_joint3
- panda_joint4
- panda_joint5
- panda_joint6
- panda_joint7

I ran into a similar problem with other robot. Do you know how to solve it?