
[slam_toolbox]: Message Filter dropping message: for reason 'discarding message because the queue is full'

Hi everyone,
I am using slam_toolbox (in ROS2 Galactic) to generate a map of an environment using Ros2 bag files of recorded Odometry and Laser Scan data.
However, when starting the slam toolbox via ros2 launch slam_toolbox online_sync_launch.py I get the following error.
[sync_slam_toolbox_node-1] [INFO] [1635173765.135318248] [slam_toolbox]: Message Filter dropping message: frame 'laser_frame' at time 1626324749.677 for reason 'discarding message because the queue is full'
Device information: - OS: Ubuntu - OS version: 20.04 - CPU: Intel(R) Core(TM) i5-8250U CPU @ 1.60GHz x 8 - GPU Nvidia: GeForce MX130 - Memory : 8GB
Moreover, I have used the default configuration of the slam toolbox as below, and warnings are shown here:
# ROS Parameters
odom_frame: odom
map_frame: map
base_frame: base_footprint
scan_topic: /scan
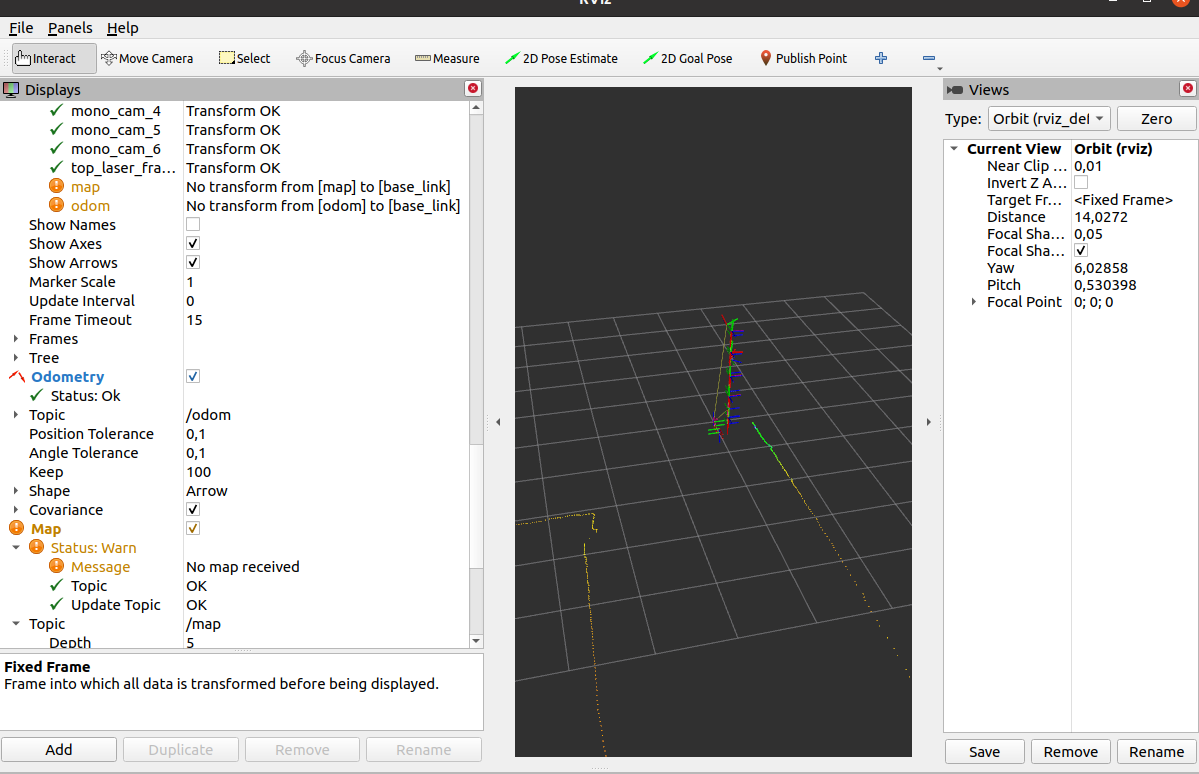
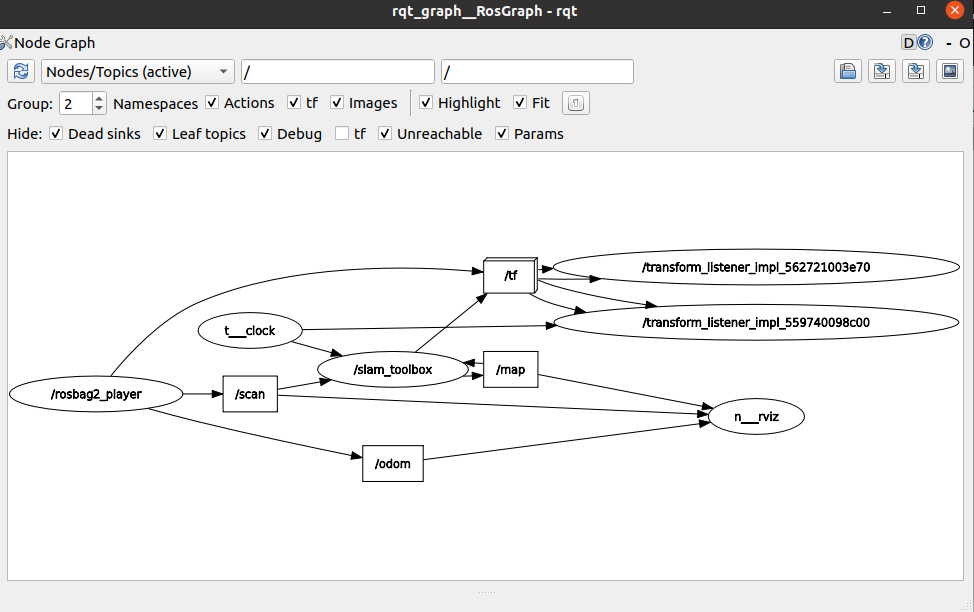
Clearly, RVIZ2 warnings are caused by the slam-toolbox which is not functioning as messages are getting discarded because the queue is full. Additionally, the rqt-graph looks like this:
I suspect my issue is with my slam configuration. Has anyone seen this type of error before? I feel like I'm missing something easy.

