
How to turn the robot before moving to goal?

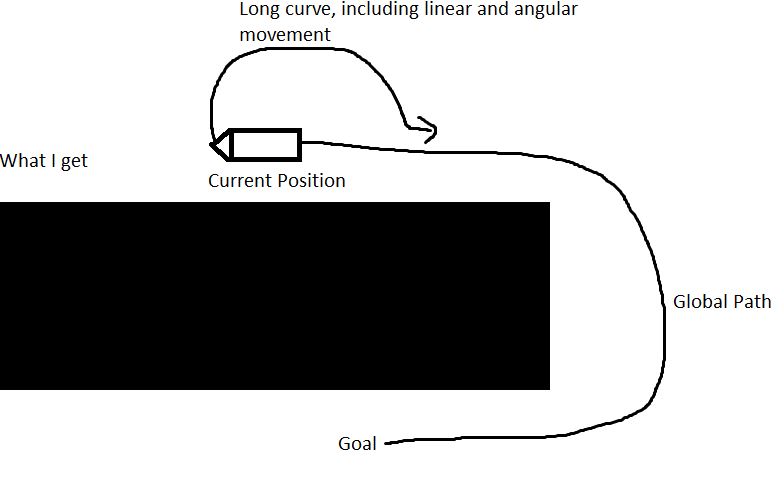
Hi, my robot has 4 wheels, 2 of them is driven by a node, which listens to /cmd_vel topic, the base_link frame is set at the center of these 2 wheels. I'm using dwa_local_planner as the local planner and GlobalPlanner as the global planner to move the robot around the map. The problem is, when a goal is given to the move_base server, instead of turning in place, it prefers to take a long curve with both translation and angular velocity. Because of this, it gets stuck in some cases. Is there anyway to turn the robot around before it follows the global path? I drew an example below, I hope it can help. Thank you!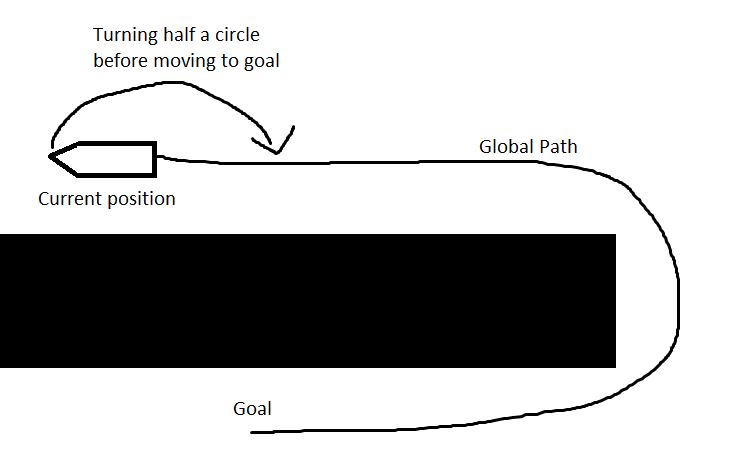 What I get:
What I get:
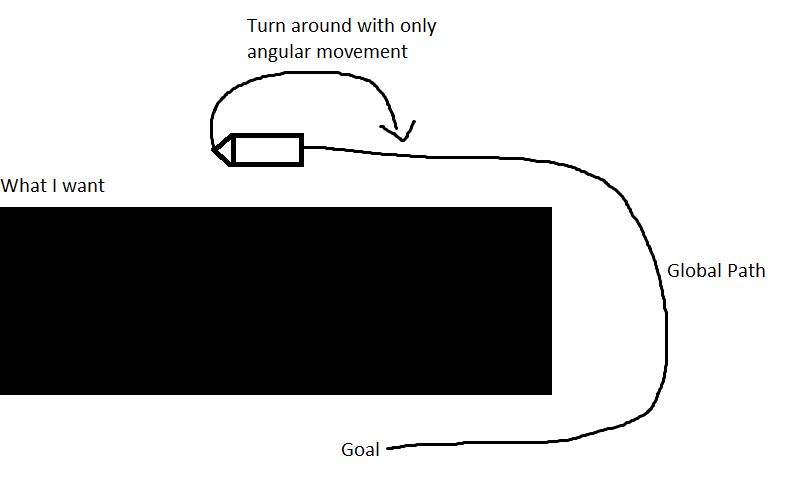
 What I want:
What I want:

Hi, in general its a diff-drive setup? Please post your dwa configuration file. dwa planner can be difficult to configure.