
TF_REPEATED_DATA issue

Hello, I'm trying to use
rosrun tf2_tools view_frames.py
but I get spammed with warnings:
Warning: TF_REPEATED_DATA ignoring data with redundant timestamp for frame wheel_left_link at time 684.167000 according to authority /tb3_1/robot_state_publisher
at line 278 in /tmp/binarydeb/ros-noetic-tf2-0.7.5/src/buffer_core.cpp
I also tried writing python code with a listener, but I get almost the same warnings, here's the code:
import rospy
from geometry_msgs.msg import Twist
from sensor_msgs.msg import LaserScan
import math
import tf2_ros
class move_bot:
def __init__(self):
self.pub = rospy.Publisher("tb3_1/cmd_vel",Twist,queue_size=100)
self.sub = rospy.Subscriber("tb3_1/scan",LaserScan,self.callback)
self.linx = 1
self.angz = 0.2
def control(self):
move = Twist()
K_d = 0.005
#K_beta
move.linear.x = self.linx
move.angular.z = self.angz
#xi_d = (error_d/rho_d)
#epsilon_d = log((1+(xi_d/M_d))/(1+(xi_d/M_d)))
#v = Kd*epsilon_d
#w = K_beta*rho_inv*r_beta*epsilon_beta
self.pub.publish(move)
def callback(self,msg):
min_dist = 1
print(msg.ranges[0])
if(msg.ranges[0]<min_dist):
self.linx = -1
else:
self.linx = 1
if __name__ == '__main__':
rospy.init_node("simple_follow")
rate = rospy.Rate(1)
obj = move_bot()
tfBuffer = tf2_ros.Buffer(rospy.Duration(1200.0))
listener = tf2_ros.TransformListener(tfBuffer)
while not rospy.is_shutdown():
try:
trans = tfBuffer.lookup_transform("tb3_1", "tb3_1/base_footprint", rospy.Time(0))
except(tf2_ros.LookupException, \
tf2_ros.ConnectivityException, tf2_ros.ExtrapolationException):
rate.sleep()
continue
#x = trans[0]
#print(x)
#obj.control()
Wondering what could be the problem. Thanks in advance
Edit:
For multiple robots I just took the file from the turtlebot3_gazebo pack, this file: https://github.com/ROBOTIS-GIT/turtle... , and just made adjustments so that there are two turtlebots instead of 3, and then just added the ros_link_attacher plugin and an aruco marker to the world.
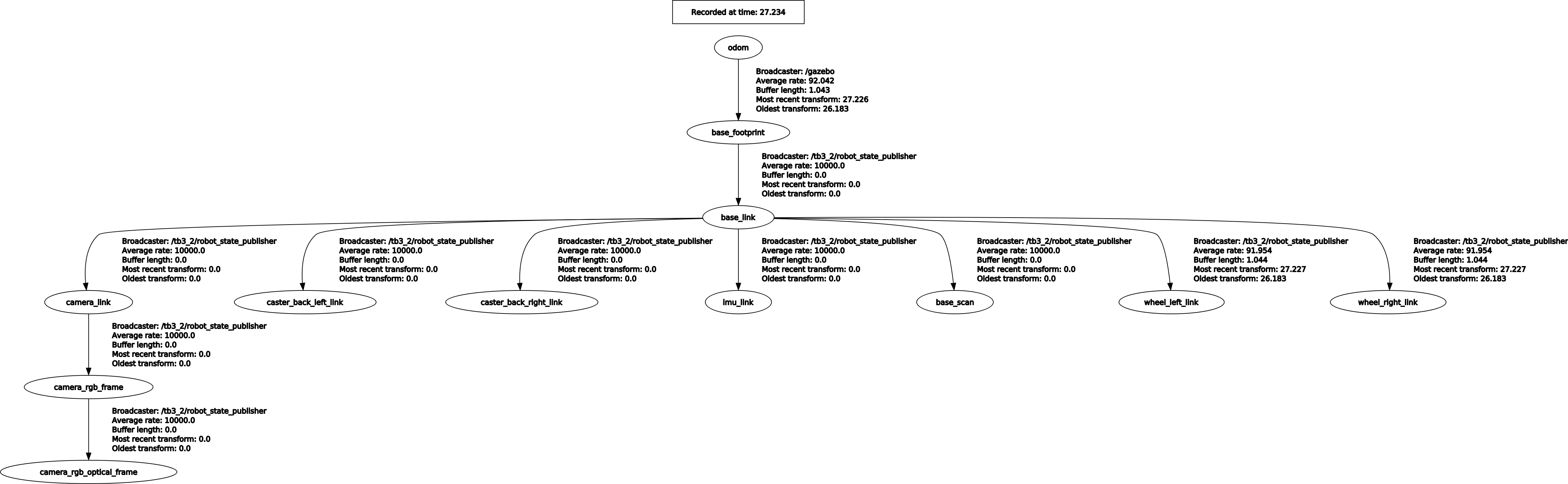
This is the tf tree
This is my world file:
<sdf version='1.6'>
<world name='default'>
<!-- A global light source -->
<include>
<uri>model://sun</uri>
</include>
<!-- A ground plane -->
<include>
<uri>model://ground_plane</uri>
</include>
<!--
<include>
<uri>model://marker</uri>
</include>
-->
<plugin name="ros_link_attacher_plugin" filename="libgazebo_ros_link_attacher.so" />
<physics type="ode">
<real_time_update_rate>1000.0</real_time_update_rate>
<max_step_size>0.001</max_step_size>
<real_time_factor>1</real_time_factor>
<ode>
<solver>
<type>quick</type>
<iters>150</iters>
<precon_iters>0</precon_iters>
<sor>1.400000</sor>
<use_dynamic_moi_rescaling>1</use_dynamic_moi_rescaling>
</solver>
<constraints>
<cfm>0.00001</cfm>
<erp>0.2</erp>
<contact_max_correcting_vel>2000.000000</contact_max_correcting_vel>
<contact_surface_layer>0.01000</contact_surface_layer>
</constraints>
</ode>
</physics>
<!-- Load world -->
<include>
<uri>model://turtlebot3_square</uri>
</include>
<scene>
<ambient>0.4 0.4 0.4 1</ambient>
<background>0.7 0.7 0.7 1</background>
<shadows>true</shadows>
</scene>
<gui fullscreen='0'>
<camera name='user_camera'>
<pose>0.0 0.0 17.0 0 1.5708 0</pose>
<view_controller>orbit</view_controller>
</camera>
</gui>
</world>
</sdf>
and this is my launch file:
<launch>
<arg name="model" default="$(env TURTLEBOT3_MODEL)" doc="model type [burger, waffle, waffle_pi]"/>
<arg name="first_tb3" default="tb3_0"/>
<arg name="second_tb3" default="tb3_1"/>
<arg name="first_tb3_x_pos" default="0.0"/>
<arg name="first_tb3_y_pos" default="1.0"/>
<arg name="first_tb3_z_pos" default ...add a comment
