
Fantom data in laserscan output
I have a problem with my laser scanners publishing corrupt data. I am using the laser merge package to combine the readings of 2 lasers into a single topic. In gazebo and with the robot nowhere near obstacles, there is a single entry in the scans topic which has data suggesting it is detecting an obstacle, pictured below :
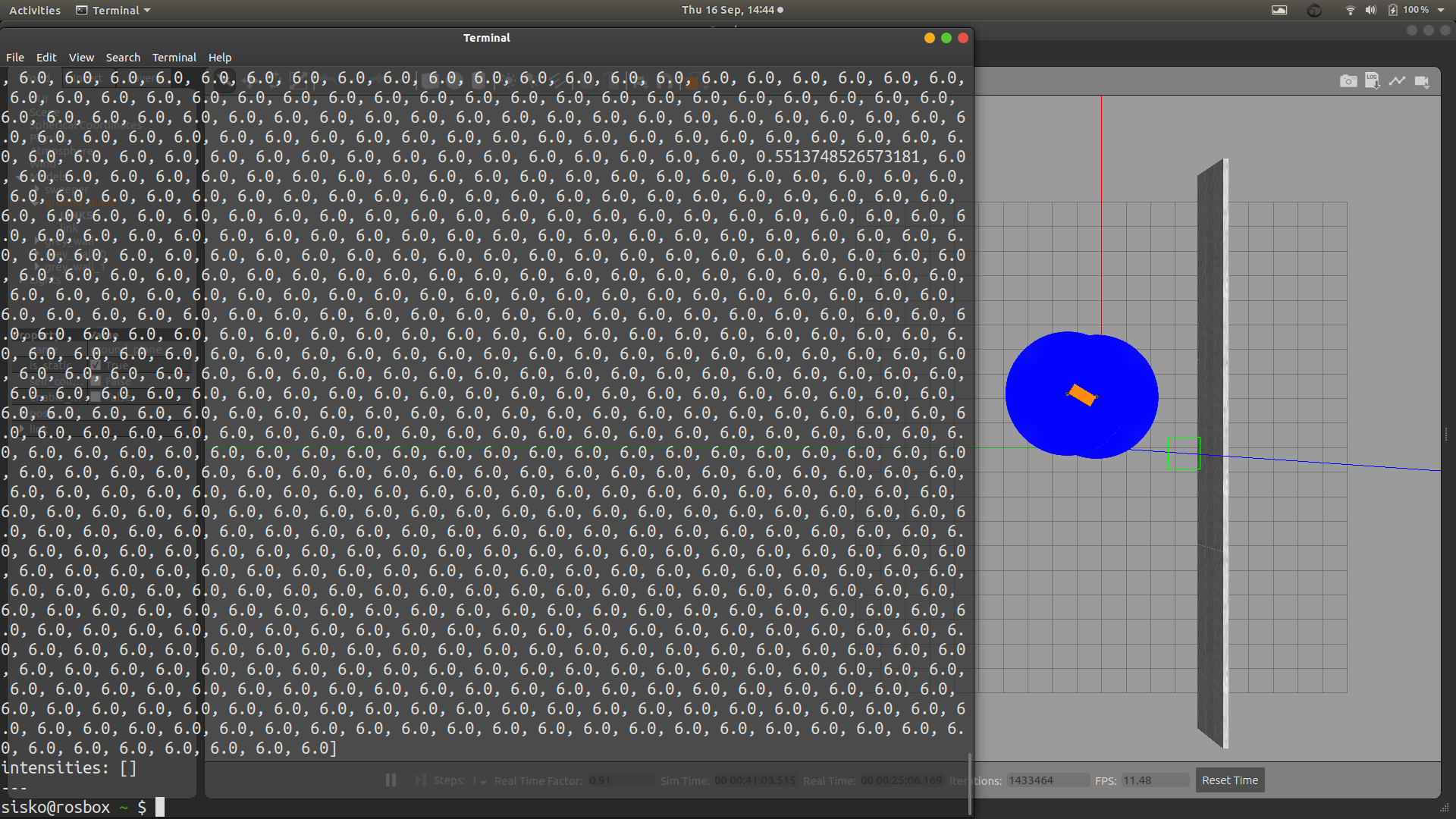
The picture above has a wall but the range of the lasers fall short of the wall. Even in open space further from the wall or without the wall, I still get the single occurance of data. That single occurance is causing issues with my code.
Can anyone help ?


Does the scan before merging detect the obstacles? ( I think the starting point is to isolate whether the simulated scan is not working or the merge is not working )