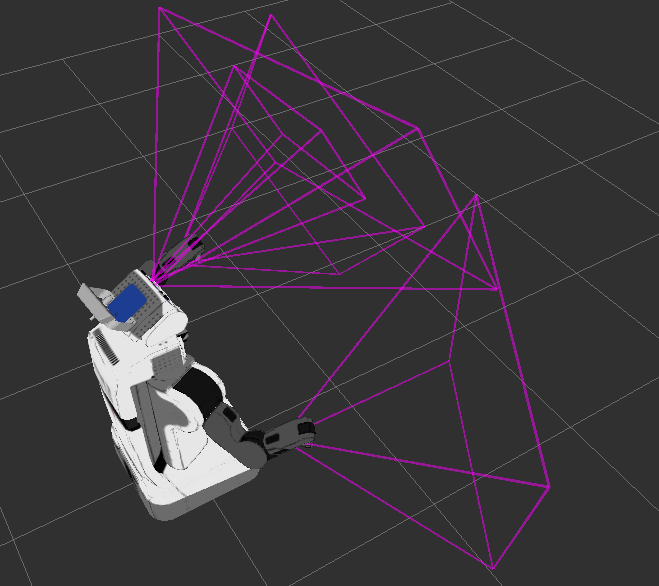
Visualize camera_info as a set of four image corner rays emanating from the camera origin in rviz?

I think this already exists (maybe it was one package among many in a github repo used in a robotics competition a few years ago), but I'm not finding it now. It would be nice to see where the corners of a camera intersect other geometry or point clouds in rviz while being able to rotate the camera around (as opposed to only looking at rviz geometry from the point of view of the camera with the Camera plugin).
A from-scratch implementation could use opencv to get a 3D vectors to each corner (or even generate additional intermediate rays to show the camera distortion), then make an rviz Marker out of them.
add a comment