
How to get STOMP-Smoothing-Adapter working with Universal Robots UR5e
My Platform is: Ubuntu 18.04.5 on kernel version 5.4.0-77-generic with an Universal Robots UR5e
My goal is to get the robot working with the OMPL as preprocessor for the STOMP-Smoothing-Adapter.
I’m running ROS-melodic and followed the installation process described in the Planning Adapter Tutorials which leads to the installing MoveIt Melodic from source tutorial. After
wstool update -t src
I also added the following packages:
git clone https://github.com/UniversalRobots/Universal_Robots_ROS_Driver.git src/Universal_Robots_ROS_Driver
git clone -b calibration_devel https://github.com/fmauch/universal_robot.git src/fmauch_universal_robot
git clone https://github.com/ros-industrial/stomp_ros.git src/stomp_ros
then did 'rosdep update' and continued the tutorials leading to catkin build and configuring the launch files.
After adding stomp_moveit/StompSmoothingAdapter in the ompl_planning_pipeline.launch.xml (as per the Neotic tutorial not default_planner_request_adapters/STOMPSmoothingAdapter as per the Melodic tutorial)
I got the demo.launch to work with the smoothing adapter. Connecting to the Robot works finde as well.
So far so got, now to the reasons I’m writing this post: After starting MoveIt with roslaunch ur5e_moveit_config ur5e_moveit_planning_execution.launch I get the following warning (I think this might be related to following errrors):
[ WARN] [1627391210.440922069]: MoveGroup launched without ~default_planning_pipeline specifying the namespace for the default planning pipeline configuration [ WARN] [1627391210.442678698]: Falling back to using the the move_group node namespace (deprecated behavior).
I then continue launching Rviz. After configuring it shows the robot in its momentary position.
When I try to move the robot to a new position by dragging the TCP in RViz I get the following error in the MoveIt terminal:
[ERROR] [1627391518.391964568]: Smoother, joint shoulder_pan_joint polynomial fit failed!
I also tried the Move Group Python Interface Tutorial. When trying the tutorial plan_to_joint_state I get the following errors:
[ERROR] [1627392151.294888709]: STOMP Start State is in discrepancy with the seed trajectory [ERROR] [1627392151.321133328]: Invalid Trajectory: start point deviates from current robot state more than 0.01 joint 'elbow_joint': expected: 0, current: -2.09437
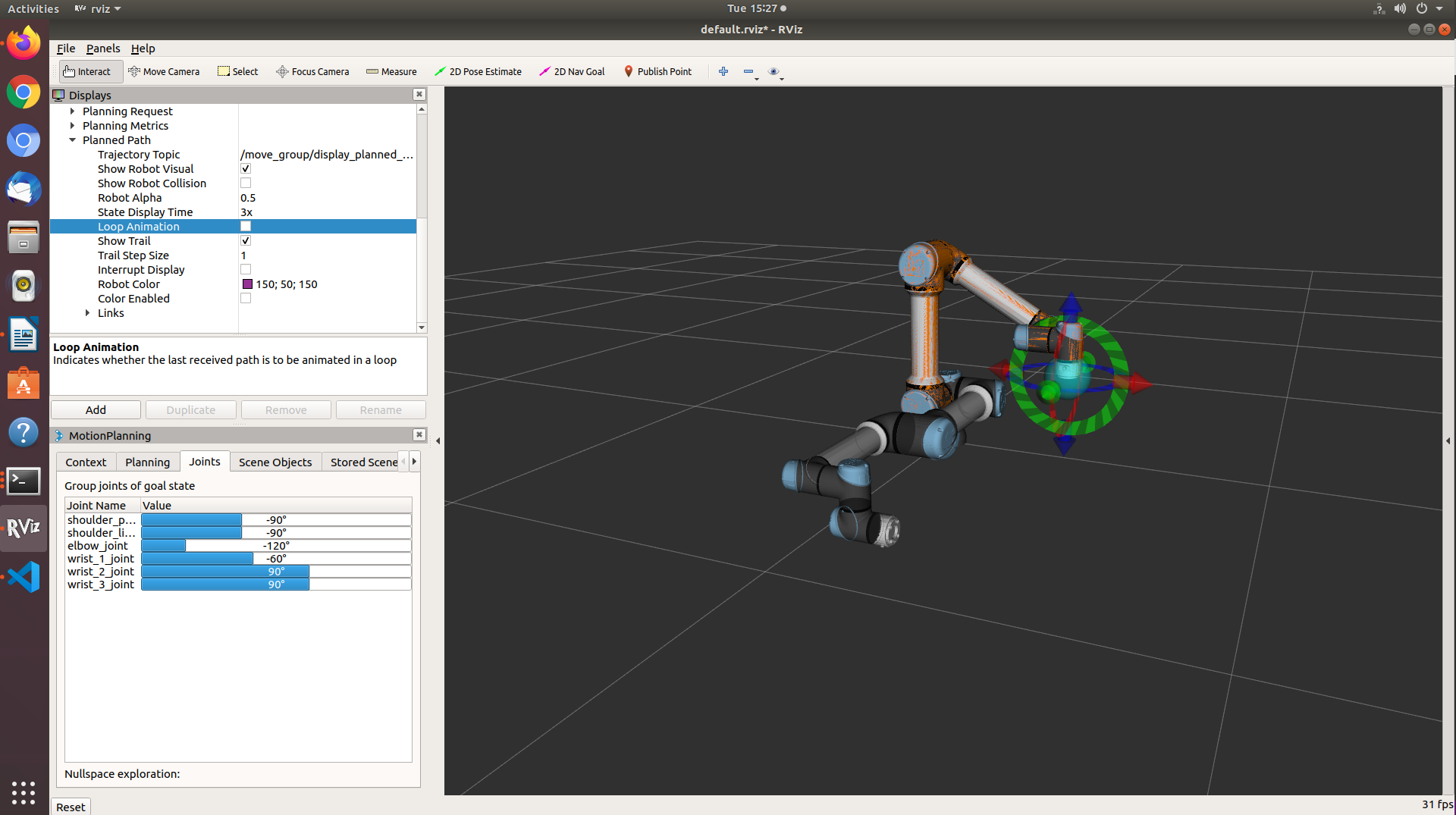
It seems MoveIt thinks there is a third robot state where all axis are in a zero state (toggeling 'show trail' results three robot positions displayed in RViz like this:
running the plan_to_pose tutorial leads to this error:
[ERROR] [1627392499.396645317]: manipulator/manipulator: Unable to sample any valid states for goal tree
Executing the cartesian path after that works somehow, though.
Finally closing everything results in the following error in the robot connection terminal:
[ERROR] [1627393408.565361003]: Could not stop controller 'pos_joint_traj_controller' since it is not running
I hope this isn’t to much information, I just fell like these warnings and errors are linked somehow. Any suggestions and directions on how to get a working environment are appreciated, thanks in advance.
