
Tuning Navigation

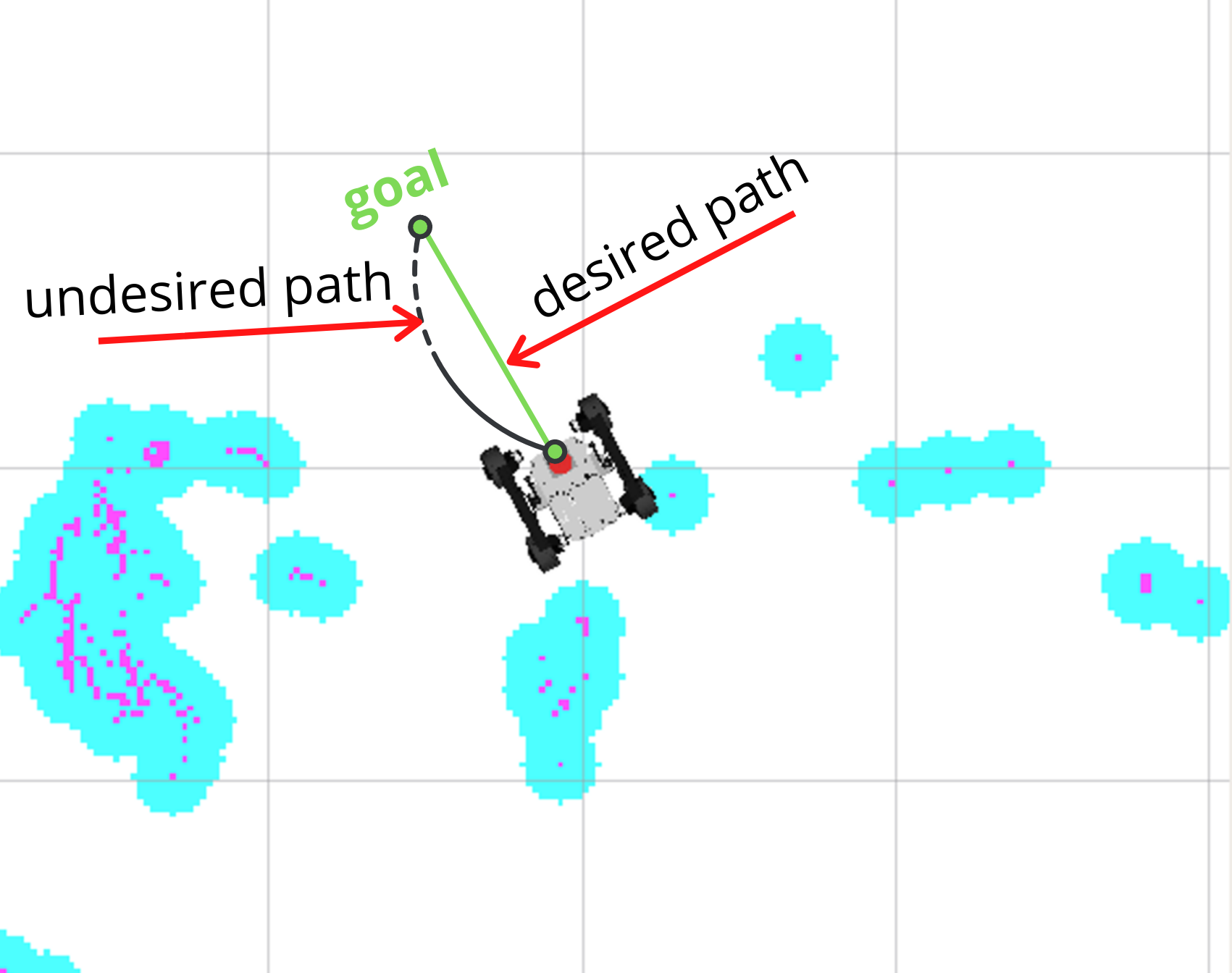
What parameter in the navigation package controls the arc or straightness of a path? Currently it creates an undesired curve or arc to reach a goal. Looking to make straight lined paths towards a goal.
| ROS Resources: Documentation | Support | Discussion Forum | Index | Service Status | ros @ Robotics Stack Exchange |
What parameter in the navigation package controls the arc or straightness of a path? Currently it creates an undesired curve or arc to reach a goal. Looking to make straight lined paths towards a goal.
I think You can try changing the following parameters.
Adjust path_distance_bias, goal_distance_bias, and occdist_scale. In particular, it is recommended to increase the path_distance_bias.
Make acc_lim_th smaller. It will reduce the possibility of selecting a curve. Note that this will also reduce the selection of curves under normal conditions.
This could help link text
Asked: 2021-07-20 18:50:48 -0600
Seen: 412 times
Last updated: Sep 07 '21
VSLAM based navigation with Kinect, where do I begin?
Problem running stage navigation tutorial
Navigation planning based on kinect data in 2.5D?
What topics are necessary to log for creating a SLAM comparison bag file?
erratic_gazebo tutorial not working
Publishing a xform from /map to /base_link?
Navigation Stack with gmapping
 ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.
ROS Answers is licensed under Creative Commons Attribution 3.0 Content on this site is licensed under a Creative Commons Attribution Share Alike 3.0 license.

This could depend heavily on the local controller used as part of your navigation setup. Which controller / local planner are you using?
I am using dwa
Sorry, @mars_rover, where did you choose between de dwa or others?