
can't visualize lego rom slam with vleodyne
hello, I am a newbie to ROS. I currently have a 9DOF axis IMU sensor and a lidar sensor from a velodyne 32C model. I used the logo-loam slam with reference to this site.
As a result, the point cloud is not visualized and the frames representing the axes keep moving away.
Please let me know if I've missed anything, thanks
First is rqt-graph


Second is the topic of imu sensor.

The third is the vlp 32C data topic.
Confirmed point cloud visualization with Velodyne.(without slam)

Visualization results through lego-loam slam, IMU, and Velodyne sensor
The frame gradually moves away as shown in the picture below.



rviz display


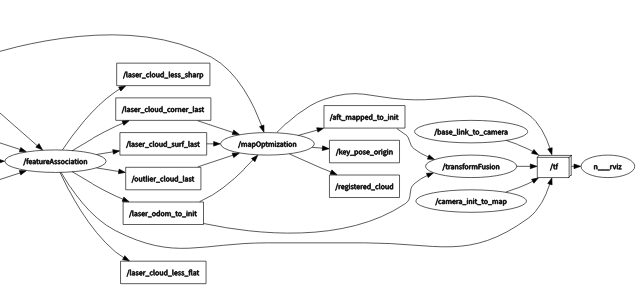
Please check the static frame used for visualization. Is the robot moving, payload sensor (pointcloud) which you are trying to visualize? Please share tf. You may run 'rosrun tf view_frames' and share frames.pdf
thank you for comment, this is my view frames