
How to correct the LaserScan Values ?

Hello everyone,
I'm Using 2 lasers on a simple robot, and I'm merging those 2 lasers with the ira_lasers_tool into a topic (scan_multi). I tried to detect the values emitted by the multi scan and using the maptolib library, to display these values in a curve. Is it normal to have obtained these results:
Explanation:
the x-axis: number of frames (1083)
Distance: in meters
Max range = 10 meters
Problem:
for example in this case there is a wall placed at less than 2 meters which is detected by the lasers (sensor.ranges [200: 400])
but between 200 and 400 as you can see it there are a lot of discontuinities. sensor.ranges [250] = 11 meters whereas it must be less than 2 meter for example ... Is this normal? are they noises ? or here is a method to optimize these values ..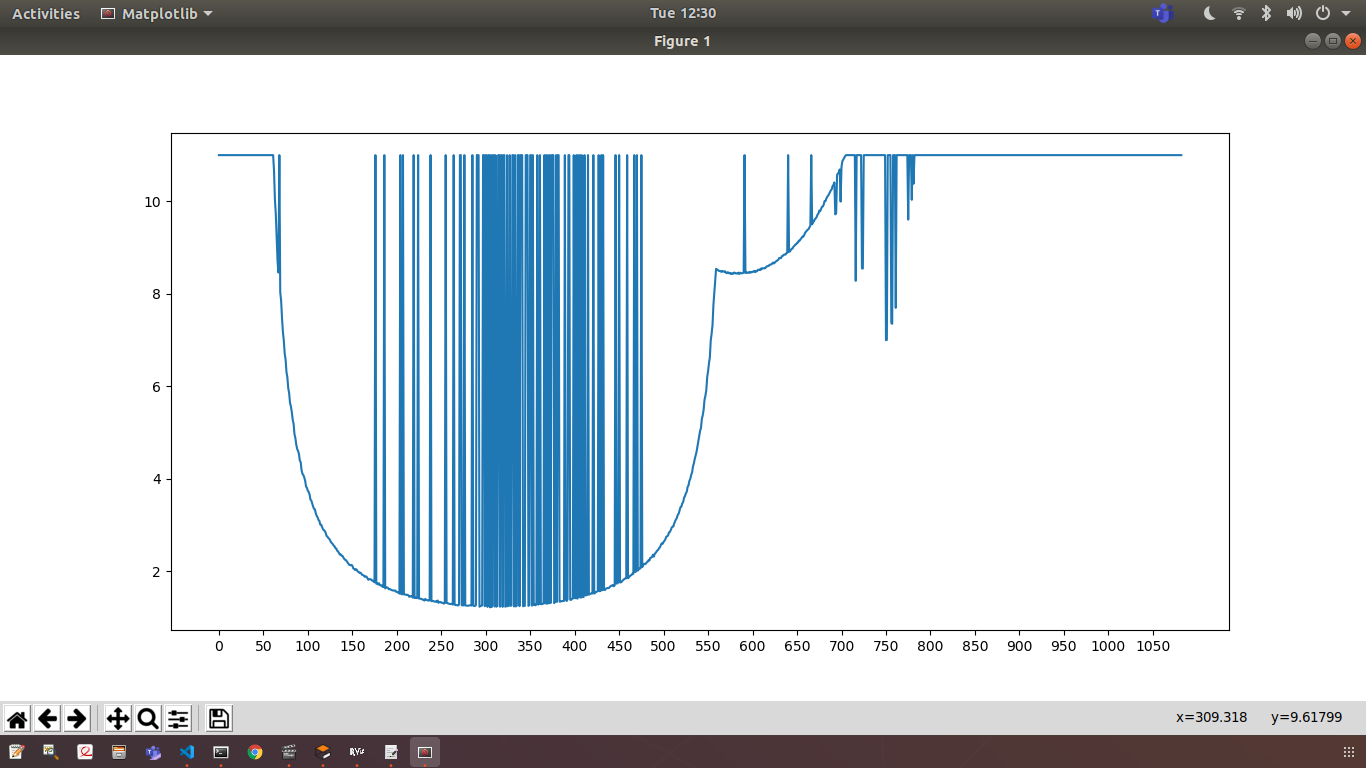
Comments
- What do you mean by "laser"? Is it a spinning lidar, or something like a laser pointer that produces just one sample at a time?
- Do you get good-looking output if you use only 1 laser, without using multi-scan?
- Does the laser have a minimum range? If so, how does the device tell you that an object is too close to measure the distance?
