
How to differentiate float vs fix status in an RTK system?

As mentioned in this question , the NavSatStatus message has a field for status, with 4 options: No fix, fix, fix with satellite augmentation, fix with ground-based augmentation.
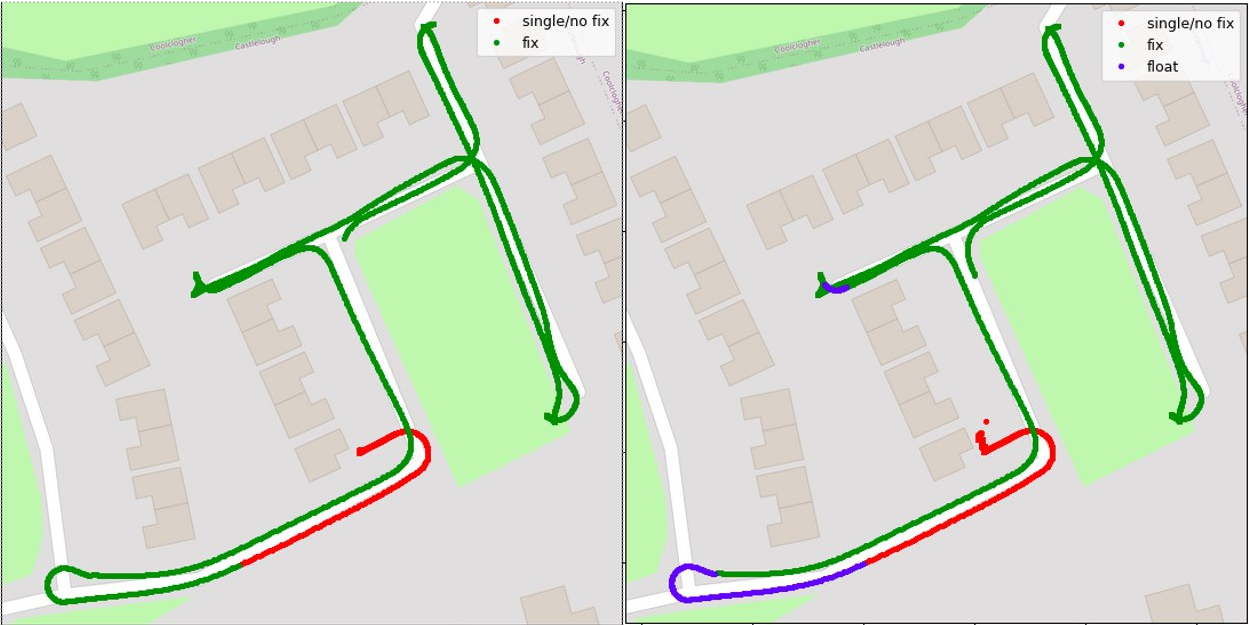
However, the GNSS receiver I am using in an RTK setup provides three solution status: Single, Float and Fix, but after using the nmea_navsat_driver node, Float and Fix are reported simply as "Fix", here below are 2 plot of the same test, on the left is the data from a rosbag file, and on the right is the log provided by the GNSS receiver.
Is there a way to get that status as part of the ROS message or should I implement/modify the nmea_navsat_driver node and the NavSatStatus message?
EDIT 1:
Just found this issue ticket at github, but it looks like it's silently ignored
