
Bounding Box Error in 3D Perception Stack of Autoware.Auto
Hi,
I was trying to use the 3D Perception Stack in Autoware.Auto to generate bounding boxes and I was facing some errors. Below is the attached rviz2 visualization alongside the simulation.
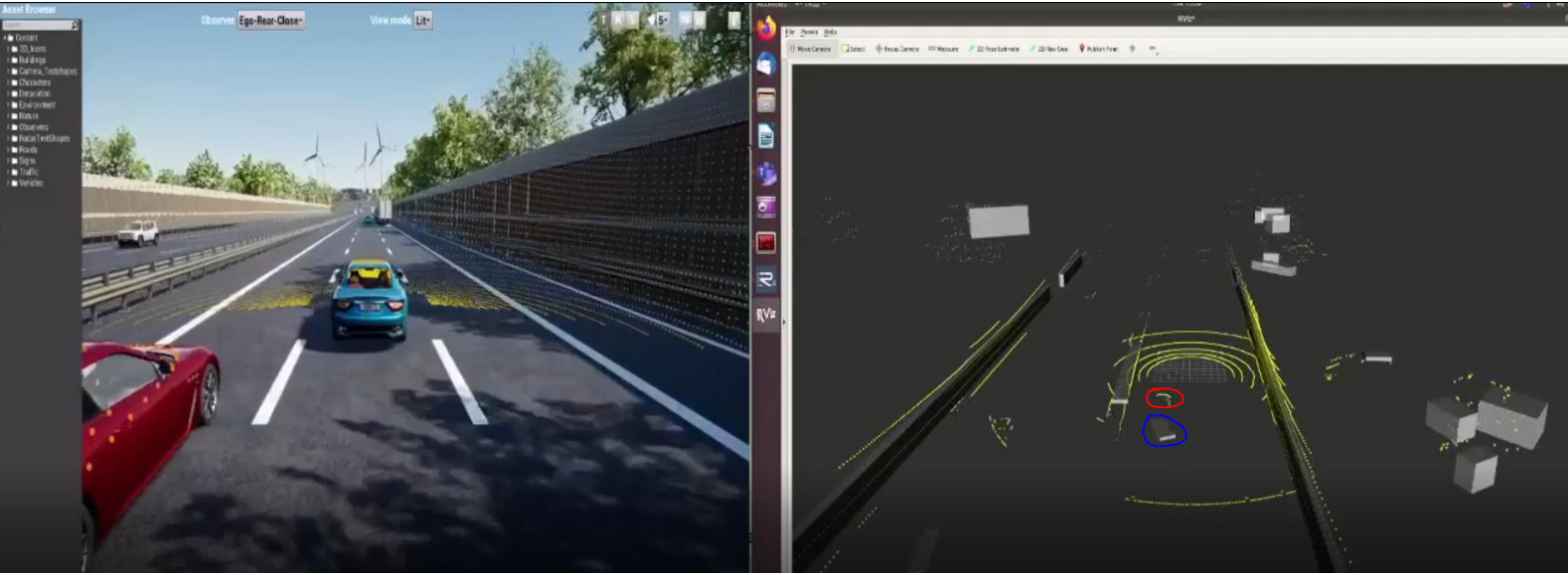
In the picture above, the blue circle represents the bounding box and the red circle represents filtered point clouds. There are two issues that I am trying to resolve:
The bounding boxes appear to be fish-tailing (rotating inconsistently). I have tried to change the parameters inside the .yaml configuration (param) files for the
point_cloud_filternode as well but it does not seem to fix that. I have tried to look at the.urdffor the Lexus vehicle for therobot state publisherand manipulate the parameters according to how the lidar is configured, but that does not seem to fix it either. This can also be seen in the bounding boxes on the right (trees) which constantly keep changing orientation.The bounding boxes appear to NOT line up longitudinally with the filtered point clouds. I have NOT changed anything in the .
yaml config file for the Euclidean cluster, so I am confused why the bounding boxes do not line up with the filtered points. I would understand if the filtered points do not line up with the actual object in the simulation (since they can be calibrated using thesensor_height_mand thestatic transformparameters) but that is not the case.
The filtered points (output of thepoint_cloud_filter node) seem to lineup with the simulation meaning that the translation parameters are somewhat correct.
Let me know why these issues are happening!
Thanks, Shlok


