
What topics need to be published in order for slam_toolbox to make a map with lidar? [closed]
Im trying to use slam_toolbox with the rplidar to make a slam map, but im not sure what i'm doing wrong. My rplidar publishes to the /scan topic, like slam_toolbox says it listens to, but when I run slam_toolbox offline_launch.py, I get [sync_slam_toolbox_node-1] [INFO] [1607463296.429952130] [slam_toolbox]: Message Filter dropping message: frame 'scan' at time 1607463295.037 for reason 'Unknown', and the map displays nothing.
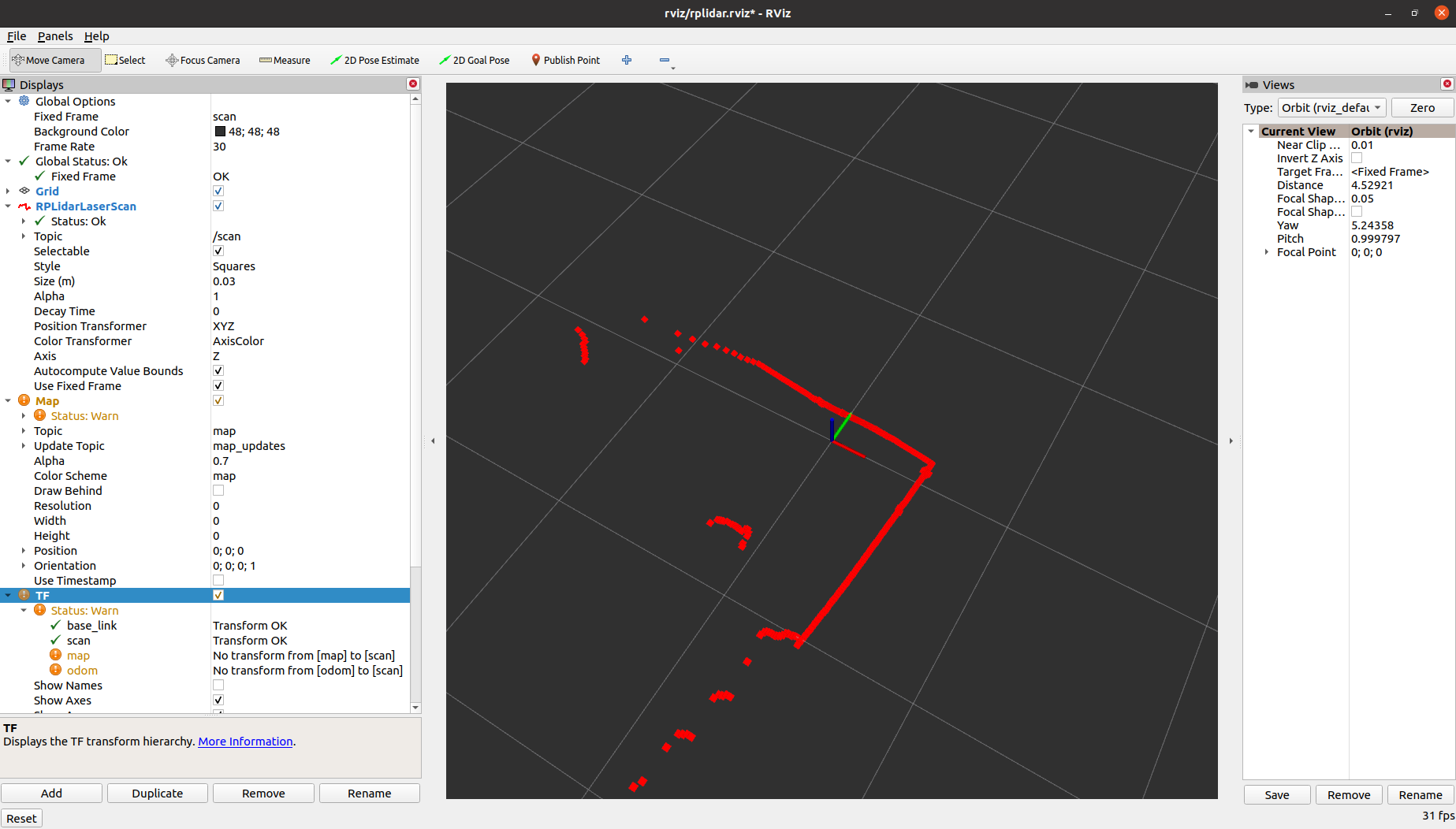
EDIT: On further research, i think the problem is im not publishing the right topics with the right information. I have a /base_link being published and the lidar /scan being published but im not sure what to publish to /odom

Edit from user shows that they fixed the issue.