
robot position changes frequently

I am using move base to move my robot autonomously from one place to another in the staic map i created using hector slam. Here the problem i'm facing is when i click the goal posiiton the robot starts to move but inbetween while it is analysing different laser scan with its rplidar a1 its hole position in map changes along with odom frame position.
As i see this is happeneing because the amcl is calculating the position for the robot itself by matching the laserscan data. How can i avoid this kind of problem? It looks like when robot reaches differetn location the laser scan data is matching with differetent locations data as a result the amcl is telling it to go their.
Here is the video demo showing this error.
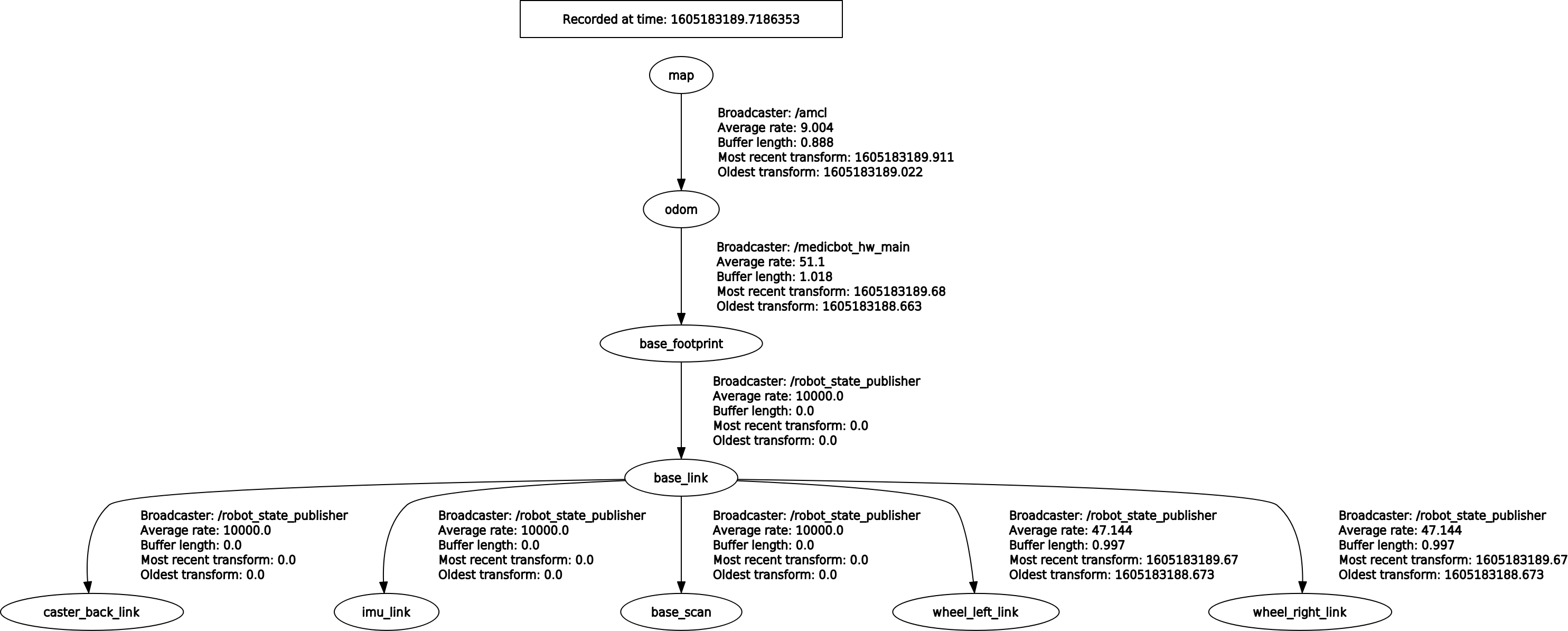
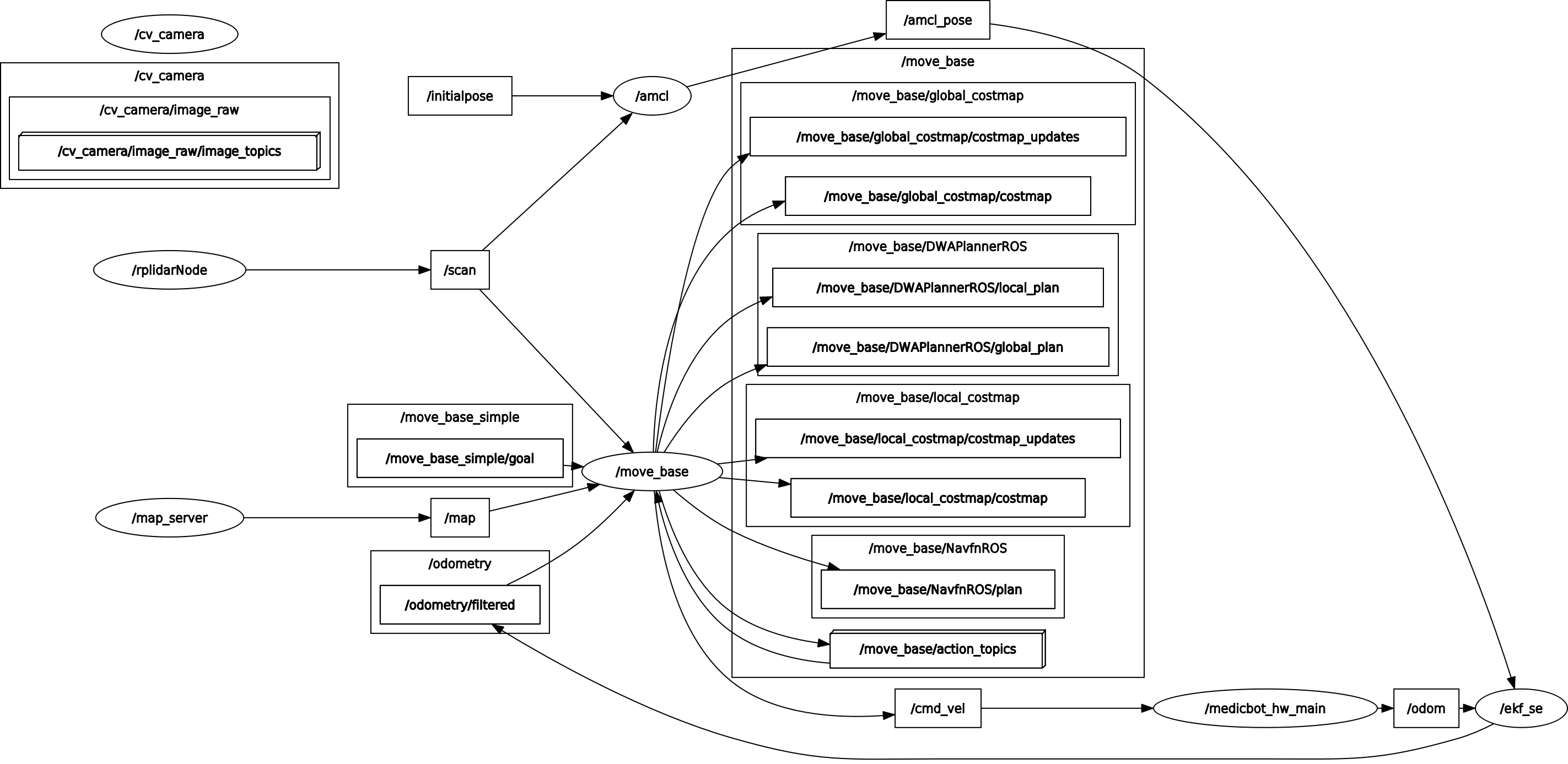
And here are the tf tree and node graph of this setup:

Did you find the answer for this problem?