
Rtab-map : unexpected occupancy grid map
Hi, I just started using Rtabmap and I'm having an unexpected 2D occupancy grid map. First, here are the parameters I'm setting in the launch file:
parameters=[{
'frame_id':'base_link',
'subscribe_depth':False,
'subscribe_rgbd':False,
'subscribe_stereo':True,
'map_empty_ray_tracing':True,
'map_always_update':True,
'approx_sync':False}]
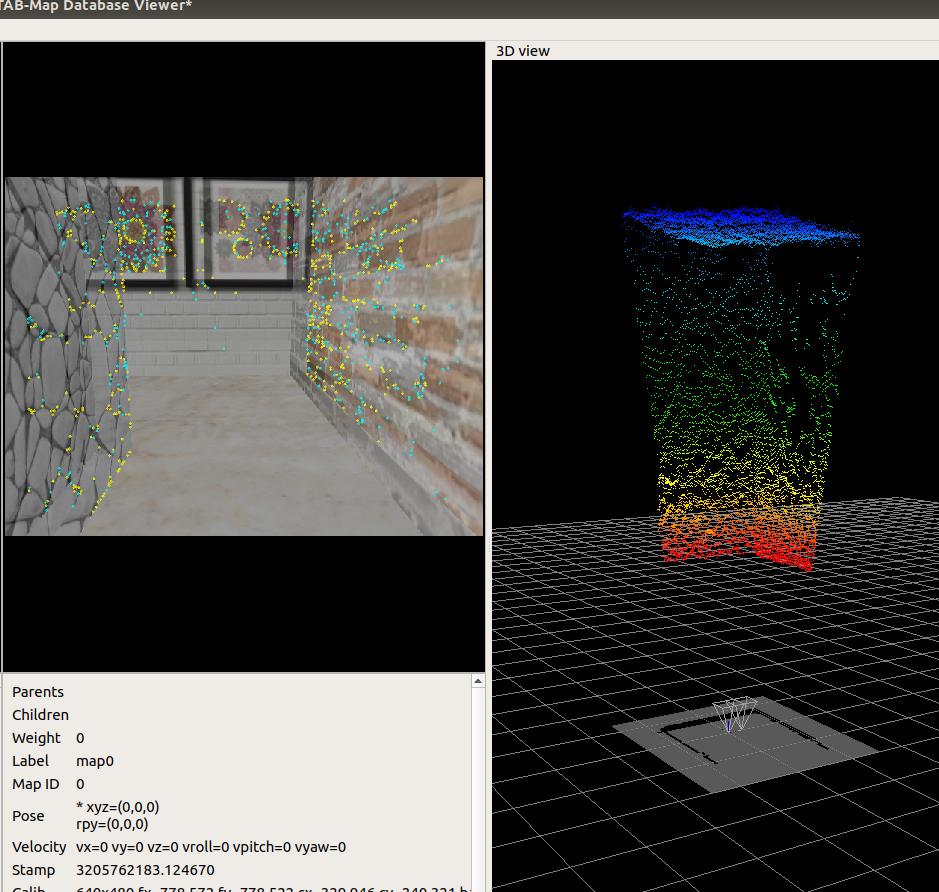
Here is my output in the 'Rtarviz' viewer. There is the 3D map, which honestly, I don't need it - the 2D grid map is all I'm interested in. By the way, the 3D map generated is duplicated, any idea why this is happening?

I subscribed to the topic '/map' in Rviz, then the map generated starts detecting the wall pretty well, but then all became black.
.
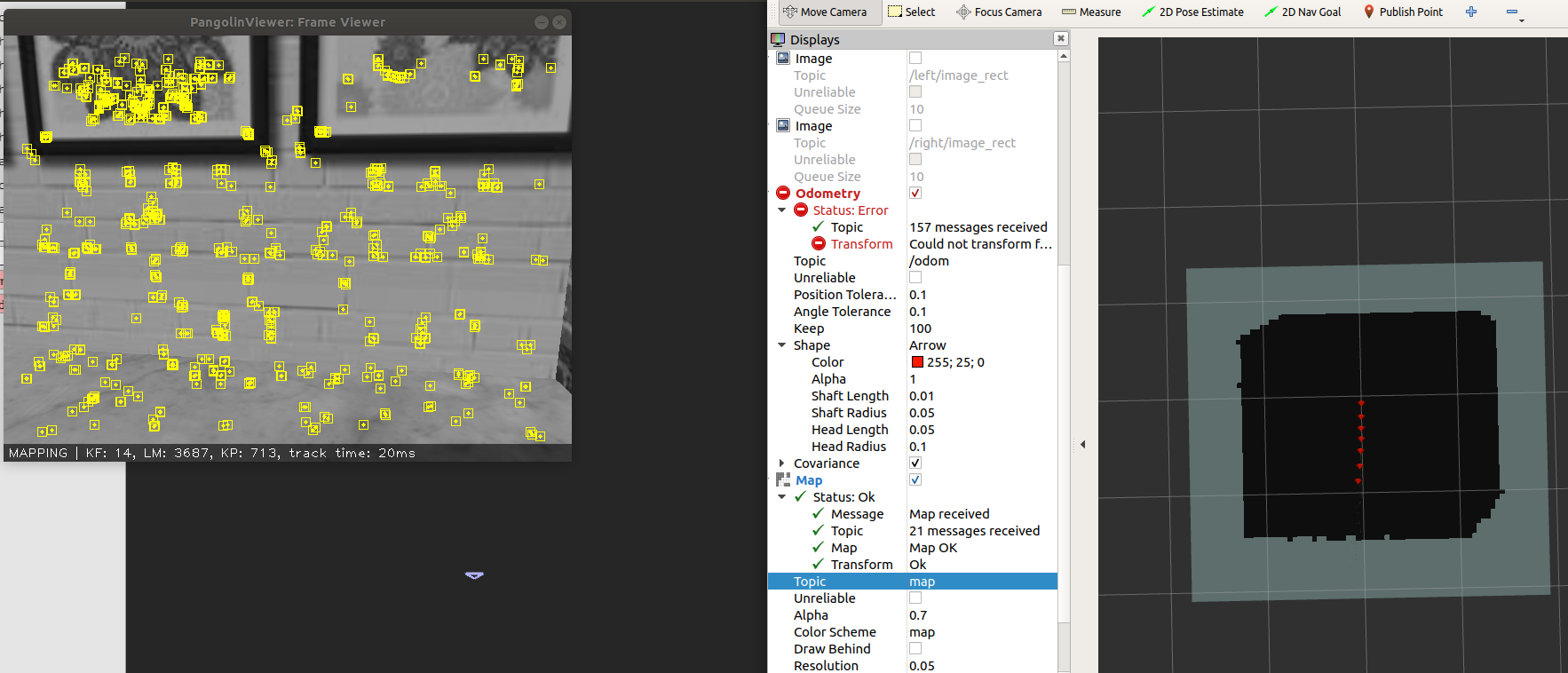
This is a virtual scene, the simple as possible, and with lots of features to be detected (sample of the frames can be observed on the left side). By the way, the ray tracer option is set to true, but no ray is forming... =/
Thanks in advance!


can you share the resulting database (~/.ros/rtabmap.db)? It could be that there is a missing optical transformation for the camera. If rtabmap thinks the camera is looking up, it may add only obstacles.
Sure! i just added to this link. Let me know anything else. Thanks for your time!
The quaternion looks ok. The Tf tree seems odd to me though, you have
map -> base_link -> camera_link, but it should be more likemap -> odom -> base_link -> camera_link. Make sure you setmapfixed frame in global options of rviz to correctly visualize in map referential. Which odometry node are you using?Yes, the fixed frame is set to
map. Regarding my node: I was publishing the odometry in the topic /odom, but just now I also added aTransformBroadcaster. I updated the main question again due to space in here. Thanks!odom->base_link should be published by an odometry node, not a static transform unless the robot is not moving.