
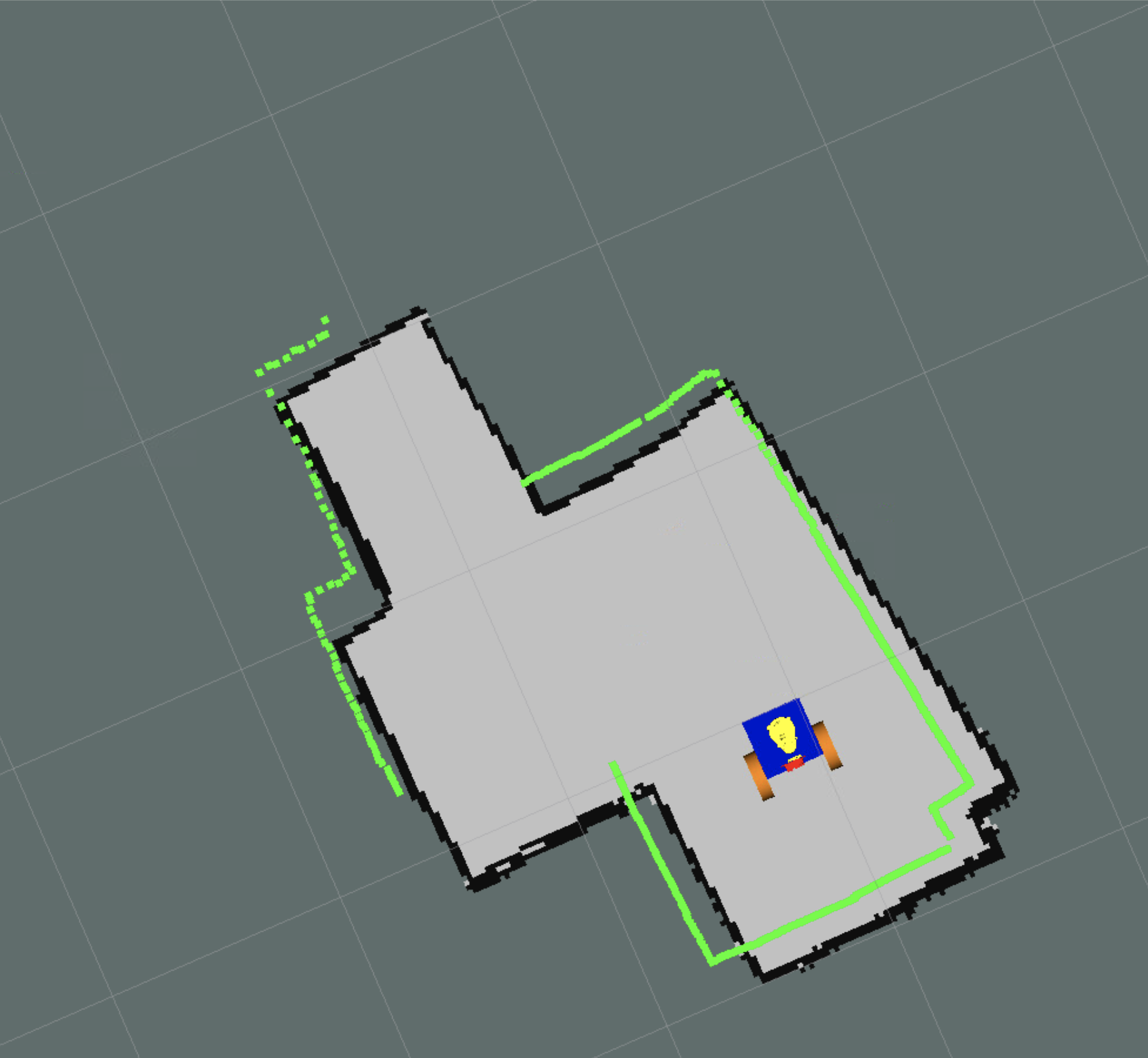
Amcl localization accurate, but slightly offset from lidar data
I have what looks like a very good localization of the robot to the map. But when overlaid with the current lidar scan data, the localization is just a little offset, but with high confidence. See attachment. What would cause that? How do I interpret that?
add a comment

