
Global planner ignores footprint

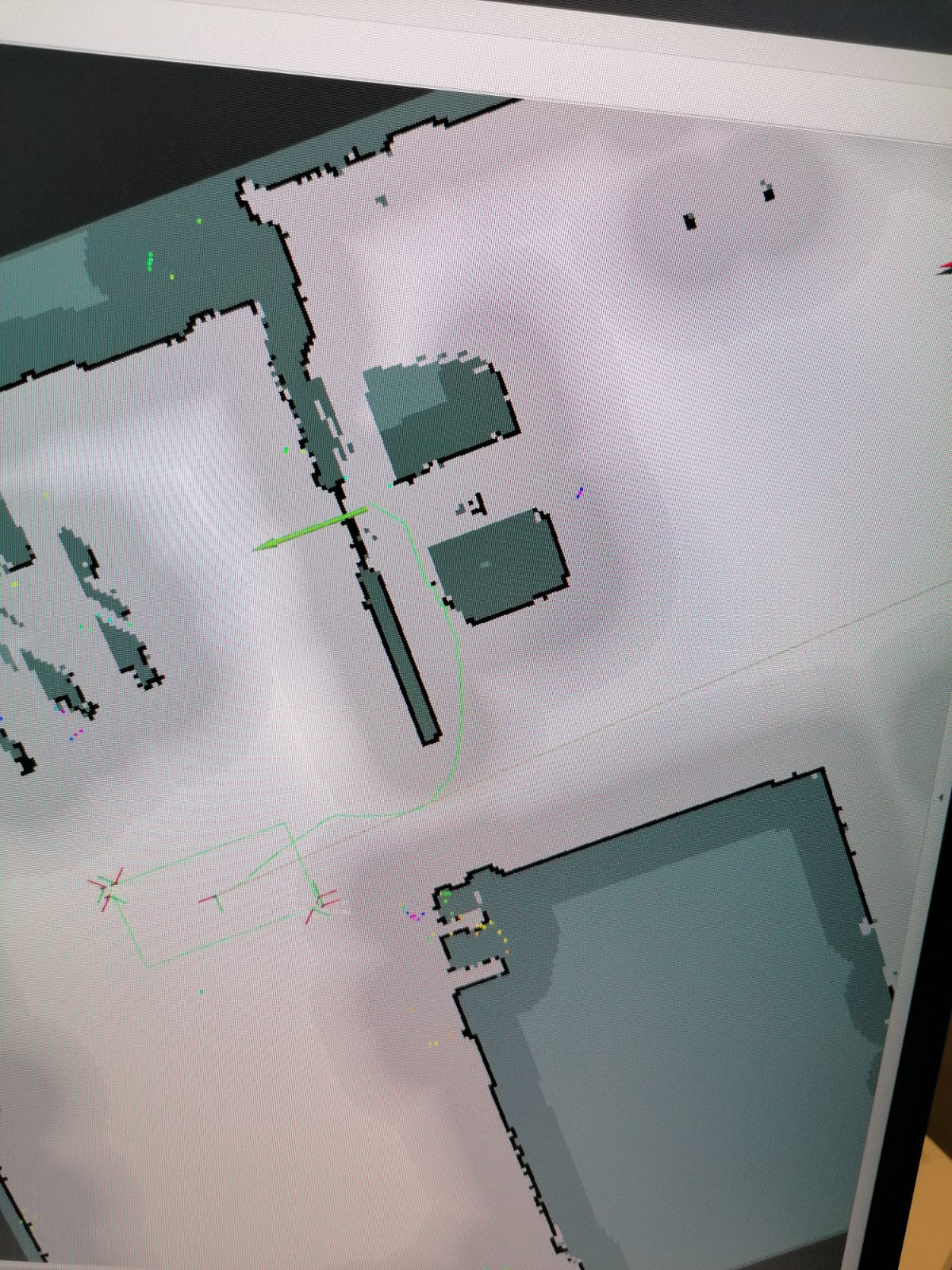
We are using a move_base service called GetPlan to obtain the global planner route. We double checked the footprint parameters (which is a rectangle footprint) but for some reason, GetPlan returns a very odd path like this:
What could be the reason?


Please explain what is odd about this route?
@JackB Look at my footprint (green rectangle) and look the path. There is no way that this big robot can squeeze inbetween those obstacles.