URDF Roll,Pitch,Yaw giving weird results
I am trying to replicate the following robot. The base link is grey and the second link is turquoise
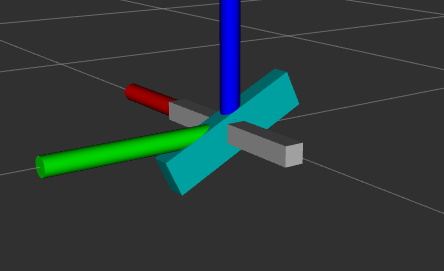
desired configuration with world frame (X-red, Y-Green, Z-Blue)
There are two links (base link in gray) and I am creating a joint between the two links located at the origin and rotated '0 -90deg -60deg' according to the intrinsic xyz tait-bryan angle description
I cannot seem to replicate the image. I have tried assigning the joint origin at
<origin xyz="0 0 0" rpy="0 -1.5708 -1.04719755"/>
or at
<origin xyz="0 0 0" rpy="-1.04719755 -1.5708 0"/>
and both give the same result.
This is my complete URDF.
<robot name="angle-check">
<link name="base">
<inertial>
<origin xyz="0 0 0"/>
<mass value="15"/>
<inertia ixx="0.3" iyy="0.3" izz="0.1" ixy="0" ixz="0" iyz="0"/>
</inertial>
<visual>
<material>
<color rgba="0.8 0.8 0.8 1"/>
</material>
<geometry>
<box size='0.5 0.05 0.05'/>
</geometry>
</visual>
</link>
<link name="link1">
<inertial>
<origin xyz="0 0 0"/>
<mass value="15"/>
<inertia ixx="0.3" iyy="0.3" izz="0.1" ixy="0" ixz="0" iyz="0"/>
</inertial>
<visual>
<material>
<color rgba="0 0.8 0.8 1"/>
</material>
<geometry>
<box size="0.4 0.1 0.05"/>
</geometry>
</visual>
</link>
<joint name="link1" type="revolute">
<origin xyz="0 0 0" rpy="0 -1.5708 -1.04719755"/>
<!-- <origin xyz="0 0 0" rpy="-1.04719755 -1.5708 0"/> -->
<axis xyz="0 0 1"/>
<parent link="base"/>
<child link="link1"/>
<limit lower="-1.0472" upper="1.0472"/>
</joint>
</robot>
Any Help would be greatly appreciated! Thank you
add a comment