
Porblem with URDF model and tf_tree

Hello all,
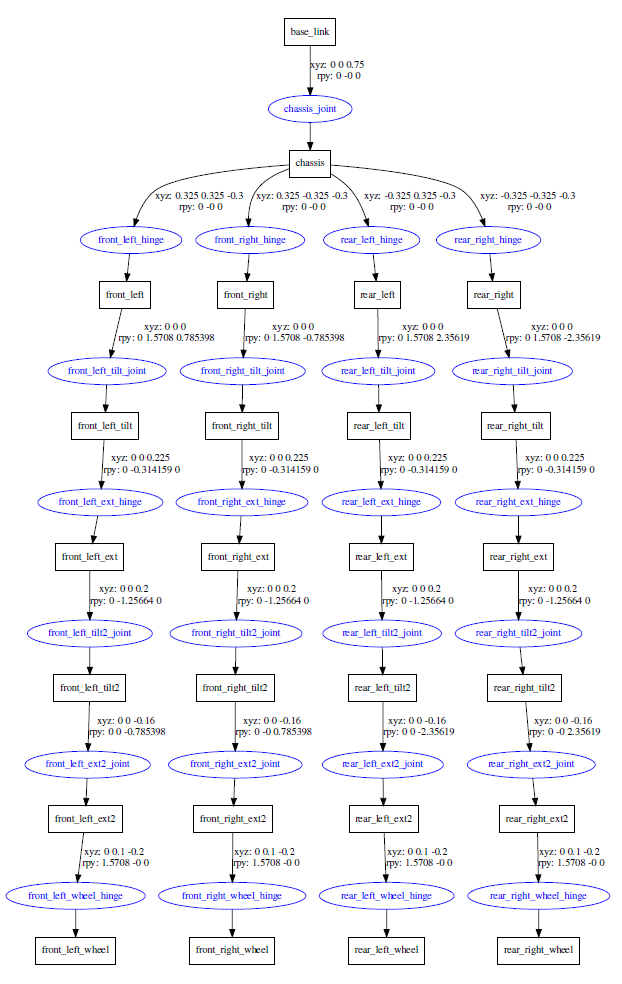
I am developing a robot from scratch. I created a urdf model (see here) and when I run $ urdf_to_graphiz Last_Mile_Robot.urdf I receive a closed kinematic chain as depicted in the following picture:
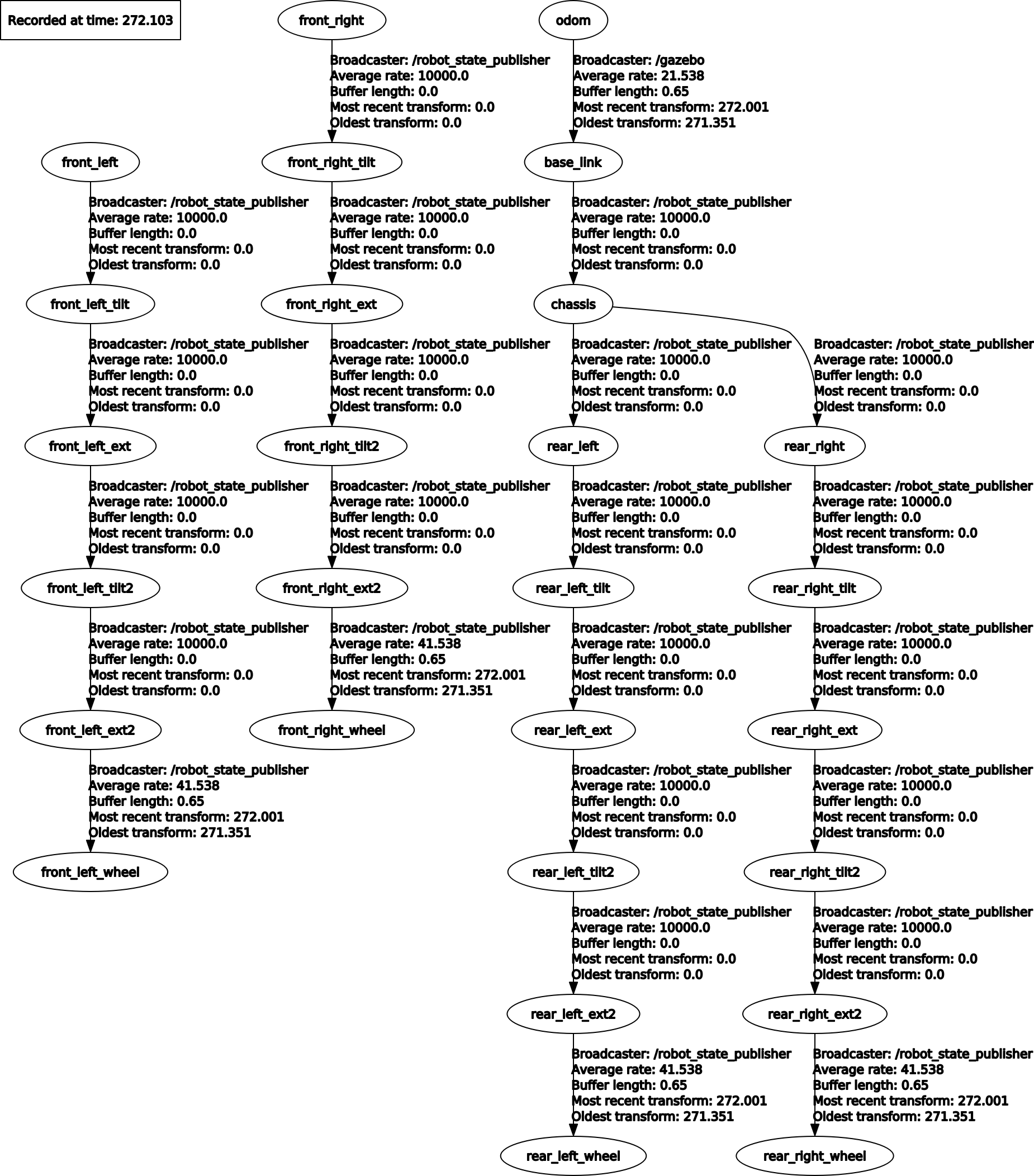
But strangely when I visualize the robot description model in rviz the kinematic chain is broken, I verivied this also using $ rosrun rqt_tf_tree rqt_tf_tree resulting in the following output:
The "front_right" and "front_left" links are connected to "chassis" using a continuous joint which looks like this (see code lines 165-172 & 190-197):
<joint name="front_right_hinge" type="continuous">
<parent link="chassis"/>
<child link="front_right"/>
<axis xyz="0 0 1"/>
<origin rpy="0.0 0.0 0.0" xyz="0.325 -0.325 -0.30"/>
<limit effort="0.1" velocity="0.1"/>
</joint>
But when I change the type of said joints to fixed the kinematic chain is closed.
Any idea why this is happening?
Thanks in advance!
All the best, Georg
add a comment
