
Two joints for one link

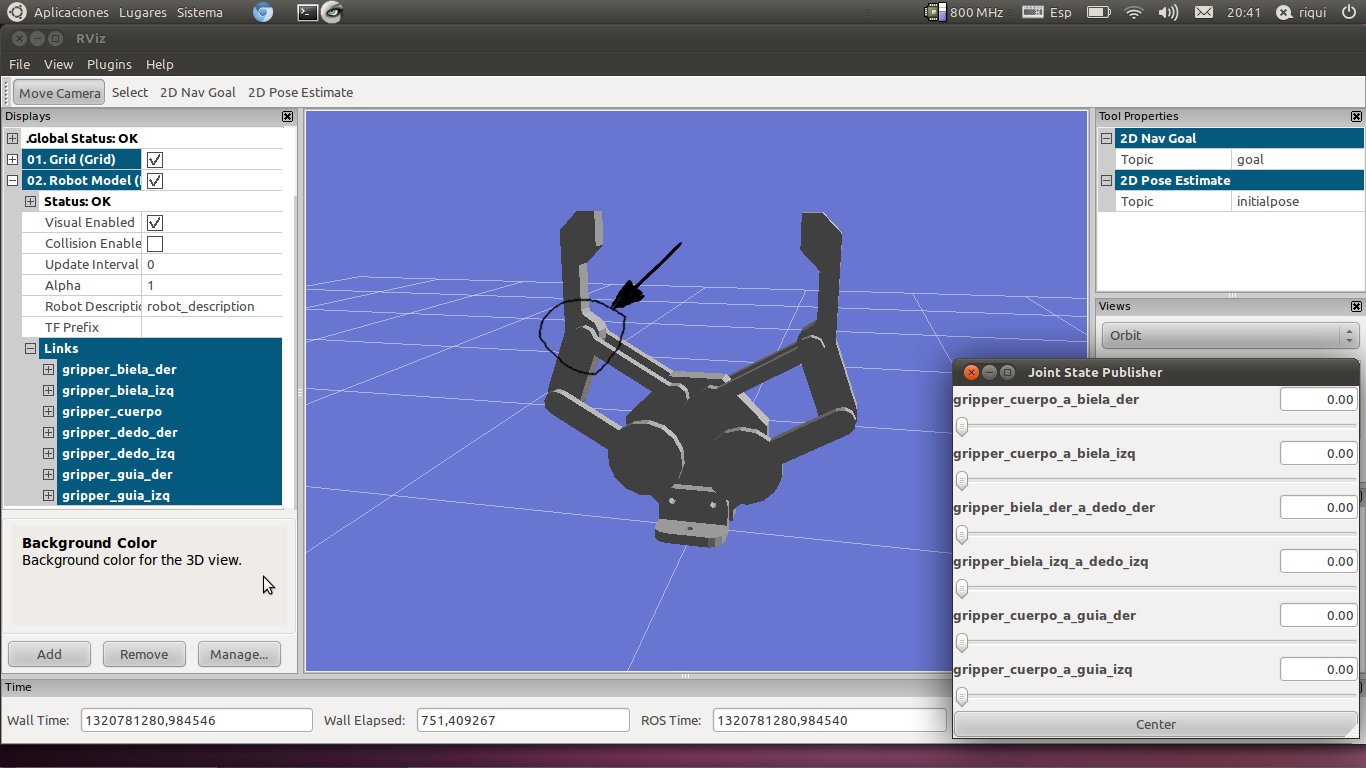
I´m buliding a URDF robot. The gripper need to connect two links to another link. Anybody know any way to connect two joins to the same link in different points?
Thanks guys!!
(and sorry for my english)
This is the joint that contains the tag <mimic>:
<joint name="gripper_cuerpo_a_biela_der" type="revolute">
<parent link="gripper_cuerpo"/>
<child link="gripper_biela_der"/>
<origin rpy="0 0 0" xyz="0.014 0 0.021"/>
<axis xyz="0 -1 0"/>
<limit lower="0.0" upper="0.548" velocity="0.5" effort="1000"/>
<mimic joint="gripper_cuerpo_a_biela_izq" multiplier="1" offset="0"/>
<!-- DONT WORK IN RVIZ, NEVER OR AT THE MOMENT?--></joint>
and this is the error in the terminal:
riqui@riqui:~/ros_workspace/modelquad/modelvisual/robots$ roslaunch modelquad display_gripper_rviz.launch model:=gripper.urdf gui:=true
process[joint_state_publisher-1]: started with pid [7100]
process[robot_state_publisher-2]: started with pid [7101]
process[rviz-3]: started with pid [7102]
Traceback (most recent call last):
File "/home/riqui/ros/stacks/urdf_tools/joint_state_publisher/joint_state_publisher", line 209, in <module>
jsp.loop()
File "/home/riqui/ros/stacks/urdf_tools/joint_state_publisher/joint_state_publisher", line 108, in loop
baseval = self.free_joints[parent]['value']
KeyError: ''


