
robot position not correct

Here is the rosgraph of the ros nodes i am running in my system. Here the rviz node is in my local linux computer and other nodes like move base, cv_camera, base controller are running in raspberry pi 4.
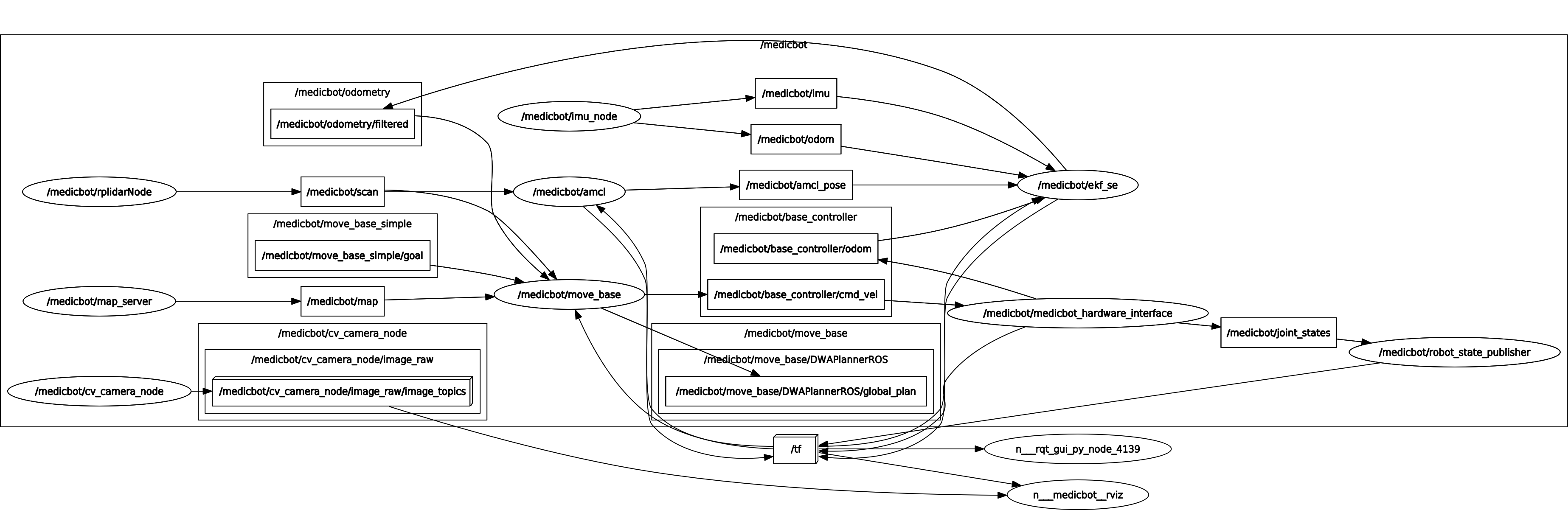 Here as i saw multiple nodes are publishing the tf node.
Problem i'm getting is that, the robot is not positioned in one place + map is changing its position.
Here is the roswtf output:
Here as i saw multiple nodes are publishing the tf node.
Problem i'm getting is that, the robot is not positioned in one place + map is changing its position.
Here is the roswtf output:
Found 2 warning(s).
Warnings are things that may be just fine, but are sometimes at fault
WARNING The following node subscriptions are unconnected:
* /medicbot/ekf_se:
* /medicbot/set_pose
* /medicbot/amcl_pose_
* /medicbot/cmd_vel
* /medicbot/amcl:
* /medicbot/initialpose
* /medicbot/rviz:
* /medicbot/map_updates
WARNING These nodes have died:
* medicbot/ros_control_controller_manager-9
Found 2 error(s).
ERROR The following nodes should be connected but aren't:
* /medicbot/move_base->/medicbot/move_base (/medicbot/move_base/local_costmap/footprint)
* /medicbot/move_base->/medicbot/move_base (/medicbot/move_base/global_costmap/footprint)
ERROR TF multiple authority contention:
* node [/medicbot/medicbot_hardware_interface] publishing transform [base_link] with parent [odom] already published by node [/medicbot/ekf_se]
* node [/medicbot/ekf_se] publishing transform [base_link] with parent [odom] already published by node [/medicbot/medicbot_hardware_interface]
add a comment
