
Package[fetch_description] does not have a path

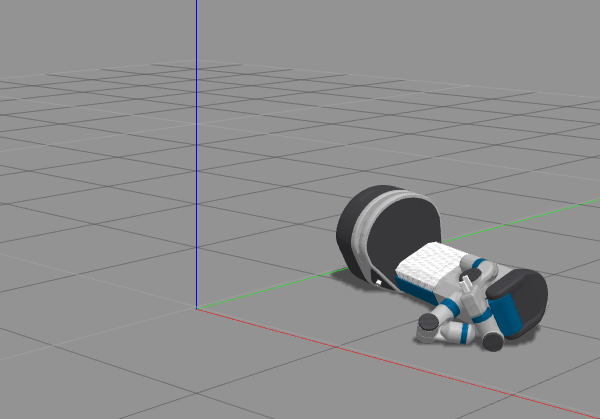
I failed to load URDF file in Gazebo. The model starts to update in a crazy way and then settled for a while.
My launch file is like following:
<launch>
<param name="robot_description" textfile="$(find fetch_robot_des)/urdf/fetch.urdf" />
<include file="$(find gazebo_ros)/launch/empty_world.launch">
</include>
<node name="spawn_urdf" pkg="gazebo_ros" type="spawn_model" args="-param robot_description -urdf -model fetch" />
</launch>
And the URDF file is like following:
<robot name="fetch">
<link name="base_link">
<inertial>
<origin rpy="0 0 0" xyz="-0.0036 0.0 0.0014" />
<mass value="70.1294" />
<inertia ixx="1.225" ixy="0.0099" ixz="0.0062" iyy="1.2853" iyz="-0.0034" izz="0.987" />
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0" />
<geometry>
<mesh filename="package://fetch_description/meshes/base_link.dae" />
</geometry>
<material name="">
<color rgba="0.356 0.361 0.376 1" />
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0" />
<geometry>
<mesh filename="package://fetch_description/meshes/base_link_collision.STL" />
</geometry>
</collision>
</link>
<link name="r_wheel_link">
<inertial>
<origin rpy="0 0 0" xyz="0 0 0" />
<mass value="4.3542" />
<inertia ixx="0.0045" ixy="0" ixz="0" iyy="0.005" iyz="0" izz="0.0045" />
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0" />
<geometry>
<mesh filename="package://fetch_description/meshes/r_wheel_link.STL" />
</geometry>
<material name="">
<color rgba="0.086 0.506 0.767 1" />
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0" />
<geometry>
<mesh filename="package://fetch_description/meshes/r_wheel_link_collision.STL" />
</geometry>
</collision>
</link>
<joint name="r_wheel_joint" type="continuous">
<origin rpy="-6.123E-17 0 0" xyz="0.0012914 -0.18738 0.055325" />
<parent link="base_link" />
<child link="r_wheel_link" />
<axis xyz="0 1 0" />
<limit effort="8.85" velocity="17.4" /></joint>
<link name="l_wheel_link">
<inertial>
<origin rpy="0 0 0" xyz="0 0 0" />
<mass value="4.3542" />
<inertia ixx="0.0045" ixy="0" ixz="0" iyy="0.005" iyz="0" izz="0.0045" />
</inertial>
<visual>
<origin rpy="0 0 0" xyz="0 0 0" />
<geometry>
<mesh filename="package://fetch_description/meshes/l_wheel_link.STL" />
</geometry>
<material name="">
<color rgba="0.086 0.506 0.767 1" />
</material>
</visual>
<collision>
<origin rpy="0 0 0" xyz="0 0 0" />
<geometry>
<mesh filename="package://fetch_description/meshes/l_wheel_link_collision.STL" />
</geometry>
</collision>
</link>
<joint name="l_wheel_joint" type="continuous">
<origin rpy="-6.123E-17 0 0" xyz="0.0012914 0.18738 0.055325" />
<parent link="base_link" />
<child link="l_wheel_link" />
<axis xyz="0 1 0" />
<limit effort="8.85" velocity="17.4" /></joint>
<link name="torso_lift_link">
<inertial>
<origin rpy="0 0 0" xyz="-0.0013 -0.0009 0.2935" />
<mass ...
I added your update as an edit to your question. In the future, please add new information as an edit to your question instead of as an answer